|
|
|
MISSION ATV 3
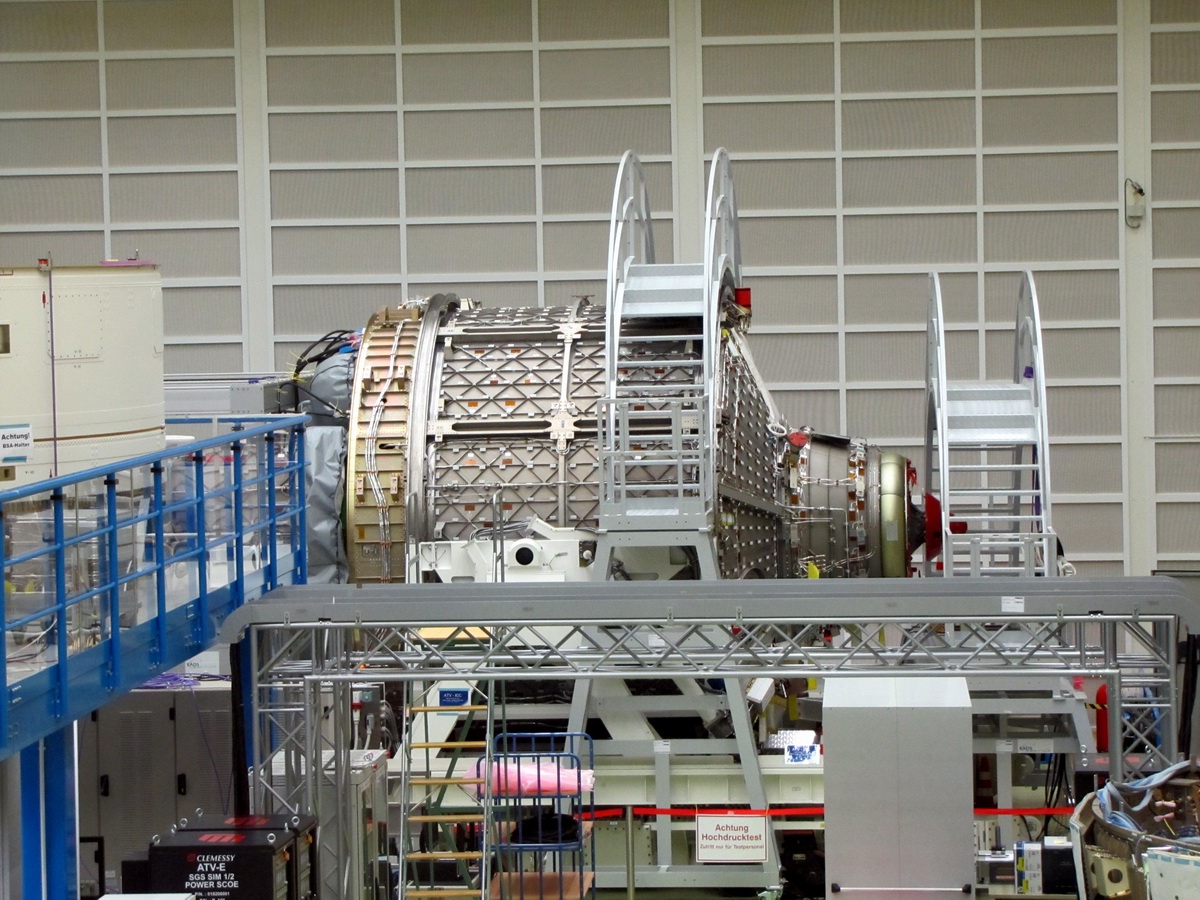
19 janvier 2011, l'ATV 3 Edoardo Amaldi prend forme à Brême, allemagne. Le lancement reste prévu pour février 2012. Les 3 parties principales sont arrivées chez EADS Brême en décembre dernier. Le véhicule est en attente d'assemblage. Le ICC Integrated Cargo Carrier, construit par Thales Alenia en Italie est arrivé par avion Beluga de Turib juste avant Noel. Il représente 60% du volume du vaisseau. Il embarque tous les liquides et le matériel. Le module de service avec les moteurs et les réservoirs de carburant est construit à Brême. L'avionique est livrée de Toulouse après des tests en chambre à vide. Le nouvel ATV baptisé en l'honneur du
scientifique italien du siècle dernier sera le premier vaisseau processer et
lancé avec pour cible une cadence d'un tir par an.
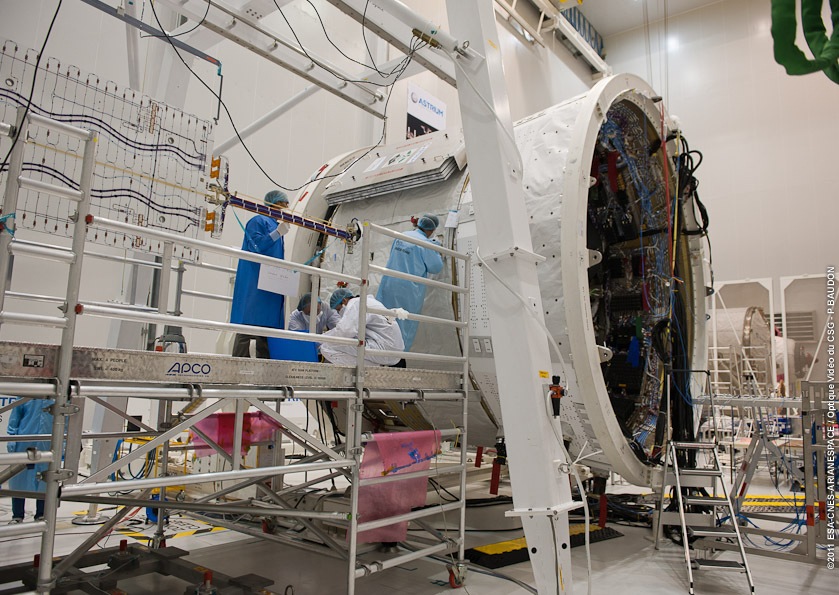
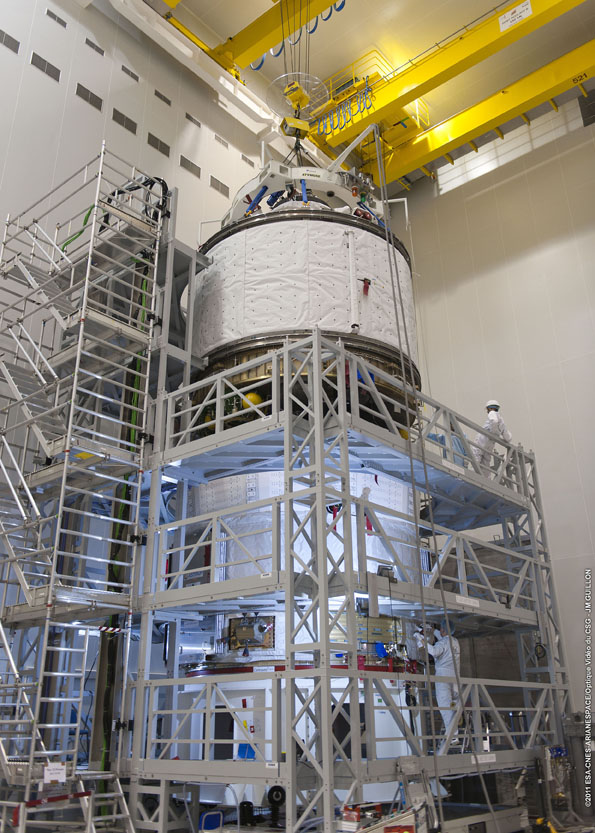
24 septembre, l'ATV arrive dans les salles blanches EPCU du CSG
Début novembre, EPCU S5C, mise en place des panneaux solaire sur l'ATV 7 novembre, Centre spatial guyanais, début de la campagne de vol de l'ATV 3 avec l'érection de l'étage EPC sur la table de lancement Ariane dans le BIL. Le 18 novembre, mise en place de l'étage EPS.
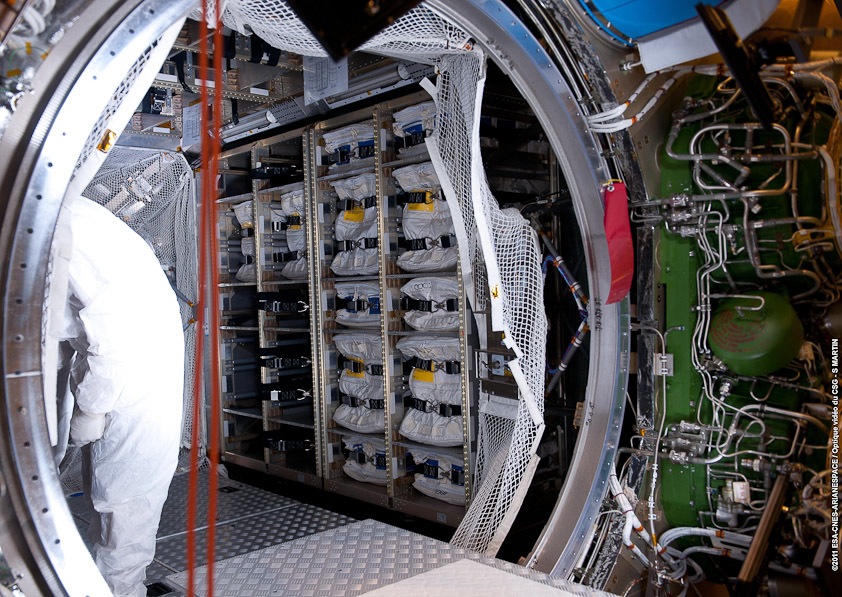
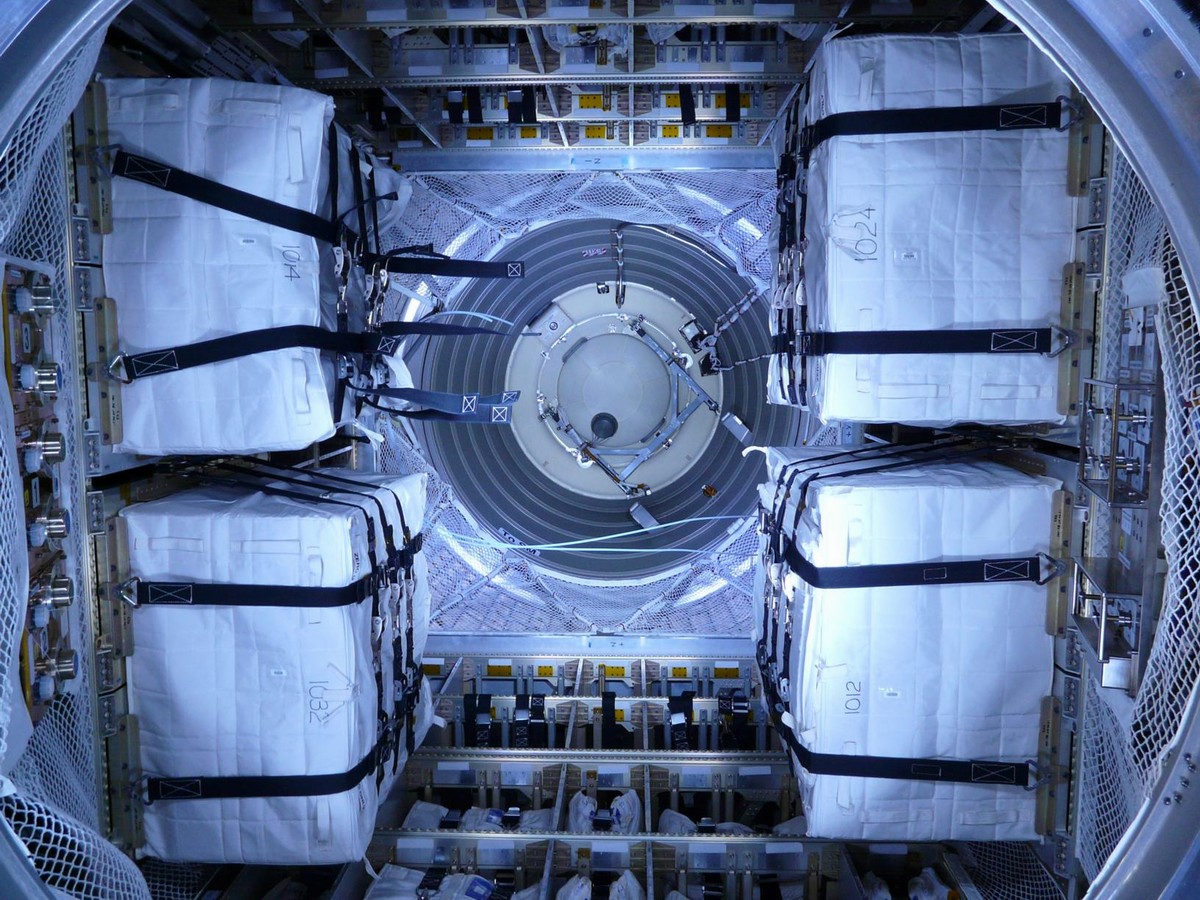
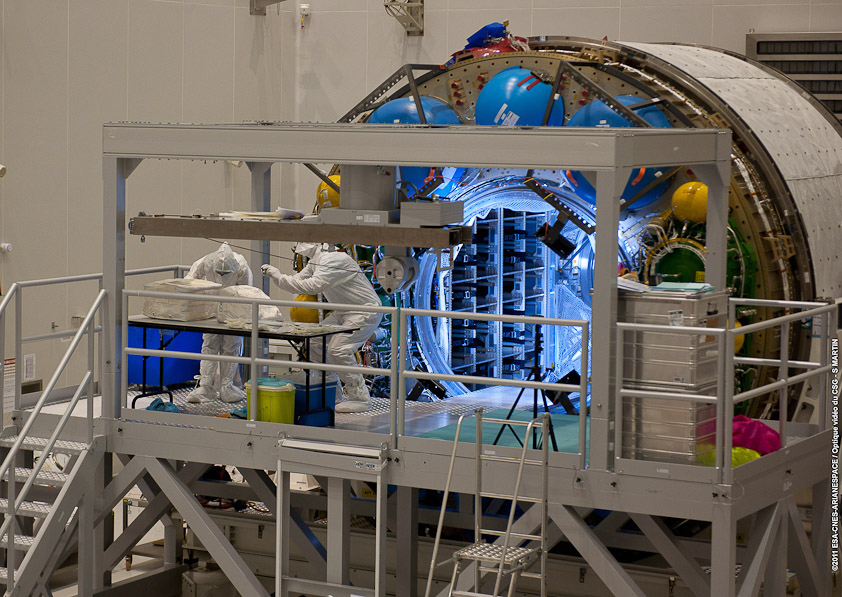
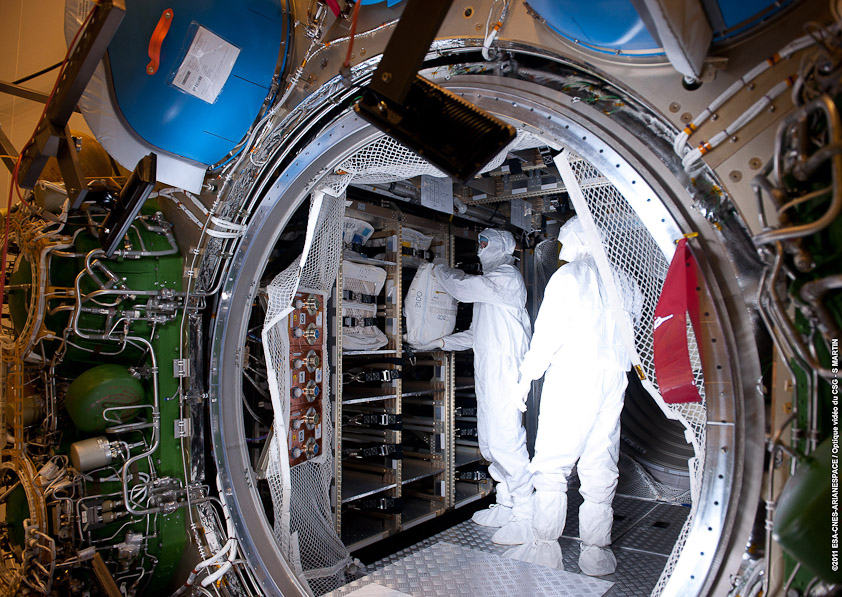
25 novembre, EPCU S5C, le chargement du compartiment pressurisé de l'ATV commence. Chaque équipement est emballé dans un sac de 49x42x50 cm appellé Cargo Transfer Bag (CTB) pouvant contenir 25 kg. Ces sacs sont ensuite rangés en "rack" dans le compartiment.
L'ATV 3 est chargé avec 6960 kg de carburant (2900 pour le cargo et 860 pour la station), de l'eau (285 kg) du gaz (102 kg) et de consommables, nourriture, vêtements et équipements de rechange (2450 kg). Par la suite, le ICC sera assemblé au module de service qui assure la propulsion, l'électricité, les commandes et les communications avec le sol et ISS.
Assemblage de l'ATV 20 décembre, VA205, transfert du lanceur dans le BAF. Le lancement de l'ATV 3 est prévu pour le 9 mars.
Alors que le prochain équipage pour ISS s'apprête à décoller de Baikonour à bord d'un Soyouz TMA-M, les résident à bord de la station se battent contre un système de communications qui permet de contrôler l’approche del'ATV. Le PCE, c'est son nom est équipé d’un module qui fait la liaison avec l’ordinateur du Segment russe de l’ISS, auquel s’amarre le vaisseau européen. Lors de l’essai de la mi-décembre, le module CPD1 a pas fonctionné. Une seconde tentative a été réalisée le lendemain, sans plus de succès. Le problème doit être résolu avant le remplissage des réservoirs du cargo, sans quoi il faudra lancer le vaisseau coûte que coûte si les responsables ne veulent pas d'un retard de plusieurs mois. En effet l'ATV ne peut garder ses réservoirs plein que 2 mois et demi pour éviter la corrosion du combustible sur les parois. 6 janvier, l'ATV est transféré du S5C au S5B pour le remplissage des réservoirs en ergols. Le vaisseau recevra 2200 kg d'ergols pour ses manoeuvres orbitales, 2500 kg pour le reboost de la station et 860 kg transférés au segment russe.
4 février, l'ATV est mis en place sur sa palette de transport en vue du transfert dans le BAF
9 février, à tout juste un mois jour pour jour du lancement de l'ATV 3 les opérateurs de l'ATV-CC ont participé à la toute dernière simulation avec les partenaires américains et russes. Mise en place pour l'ATV 2, l'ATAC (ATV Training Academy) gère la formation et la préparation des équipes. Pour la mission ATV 3, ce sont 43 cours "class room" qui ont été donnés, ainsi que 17 simulations internes d'une journée et trois simulations longues sur plusieurs jours d'affilée. Six simulations avec les partenaires (les Joint Integrated SImulation) ont également eu lieu, une dernière se tiendra durant la phase attachée, où les opérateurs simuleront une rentrée atmosphérique du cargo européen. L’ATV-CC, en relation avec les Centres de Contrôle ISS de Houston et Moscou, remplit sept grandes fonctions :
Pour éviter tout risque, un Centre de Contrôle de secours existe au sein du CNES à Toulouse.
Photo: CNES/Frédéric Maligne 27 février, mise en place de la coiffe sur le lanceur. Les techniciens ont chargé le compartiment pressurisé de 600 kg d'équipements pour la station en 2 jours depuis le 14 février, avec notamment des paquets pour les équipages et une pompe de 50 kg pour le système de traitement des urines (Fluids Control Pump Assembly) placé dans un sac spécial de grande taille le M-01 monté sur un plaque d'adaptation devant les racks de stockage. L'installation de ces équipements alors que l'ATV est en position verticale a nécessiter un équipement spécial. Une maquette de l'ATV a été construite en Suisse pour simuler cette opération. L'écoutille a été ferme le 16 février, puis le vaisseau a été préparé pour le lancement, les protections thermiques vérifiées et les couvertures de sécurité enlevées. Le lanceur sera amené en ZL3 le 7 mars. Le lancement reste prévu pour le 9 mars à 10h 05 TU. Le cargo ATV s'amarrera à ISS le 18.
ATV CC Toulouse, pour l'équipe CNES qui
gère les éléments de planning ATV vers les partenaires du programme ISS,
les échanges opérationnels ont commencé depuis le 15
février. Les demandes de réservations de services
ARTEMIS ont été envoyées à AMCF à REDU (Belgique) pour la semaine du
lancement et du docking. L'effectif total est de 10 personnes réparties en 2 groupes de 5. Les équipes tournent tous les 15 jours (15 jours on console en tant que OPS manager/AIO et 15 jours en tant que planner), la polyvalence permet un bon niveau de gestion des affaires planning 24h/24. 1er mars, Arianespace repousse le lancement de quelques jours. Il est maintenant prévu pour le 23 mars, 4h31 TU. L'amarrage avec ISS se fera sur 5 jours au lieu de 10. 13 mars, l'ATV est de nouveau "recoiffé" 21 mars, le lanceur 553 est amené en ZL3.
Le lancement a lieu le 23 mars, après un compte à rebours sans problème, à 4h34 TU. A 5h38, le cargo se sépare du l'étage EPS, il est en orbite. Après déploiement des ailes solaires, il entame son approche vers la station sous le contrôle de centre de Toulouse.
24 mars, le premier test CAM (Collision Avoidance Manoeuver) est effectué. Il s'agit d'une activité majeure puisque la capacité du véhicule à exécuter une manoeuvre d'évitement pendant le rendez-vous est vérifiée. Après Pink Martini pour l'ATV 2, c'est le groupe allemand Love & Mersey qui a écrit une chanson dédiée à l'ATV 3 Edoardo Amaldi et souhaitant bonne chance à l'astronaute de l'ESA André Kuipers qui surveillera l'amarrage depuis la Station. Ce morceau est inspiré de la fameuse chanson des Beatles "Back in the USSR" et a été écrite en 3 langues, allemand, russes et anglais. 25 mars, le mat de communication avec l'ISS
(ADB : Antenae Deployable Boom) est à présent en place.
Par rapport à une mise à poste
classique de satellite, la difficulté de la mission ATV tient au fait que le
point de rendez-vous, la Station, n’est pas fixe mais en mouvement, ce qui
suppose un phasage avec la Station
Spatiale particulièrement soigneux. L'ATV
n'a pas été lancé dans une fenêtre de tir proprement dite mais à un moment
donnée. Ce H0 permet à Ariane de « libérer » l’ATV lorsque celui-ci se
trouve dans le plan orbital de l’ISS.
Le rendez-vous avec l’ISS se fait sur une orbite circulaire, à environ 350 kilomètres d'altitide. Au terme du phasing, l’ATV va se trouver derrière la Station Spatiale Internationale. Il va alors se positionner dans l’axe du port d’amarrage russe Zvezda et s’en rapprocher mètre par mètre, jusqu’au contact. L’ATV a été injecté sur une orbite circulaire plus basse que l’ISS. Par conséquent, le cargo européen est plus rapide que la Station Spatiale. Ces opérations de phasage amènent l’ATV
dans la proximité de la Station et permettent d’engager le rendez-vous. Il
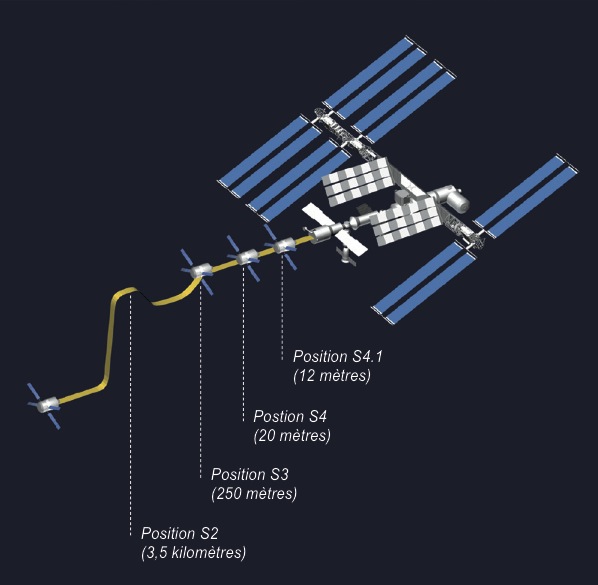
débute par l’approche initiale, dit «homing». Autonome, cette opération va
positionner l’ATV sur l’orbite de l’ISS, a 3500 mètres derrière la station :
c’est le point S2. Il est alors placé en position d’attente,
le temps d’obtenir la permission du sol de poursuivre
sa route. Il en sera de même progressivement à 250 mètres (S3),
20 mètres (S4) et enfin 11 mètres (S4.1).
L’amarrage est entièrement automatique. En cas de problème, les équipes de l’ATV-CC ou les astronautes à bord de l’ISS peuvent stopper l’approche et enclencher des manoeuvres d’éloignement. Dans le pire des cas, il est également possible de déclencher toute une série programmée de manoeuvres anti-collision (Collision Avoidance Manoeuver), qui sont indépendantes du système de navigation principal. Le système d’amarrage est identique à celui d’un Soyouz ou d’un Progress. Une fois que les crochets sont fermés et que la sonde d’amarrage de l’ATV est rétractée, le "docking" se poursuit avec les raccordements électriques et ceux du bus de données. Le sas sera alors ouvert le lendemain par l'équipage de la station et l’ATV deviendra temporairement un nouveau module de l’ISS. Au cours de l’approche finale de l’amarrage, les astronautes à bord de l’ISS peuvent activer des manoeuvres d’arrêt, de retraite ou d’éloignement. Pour cela, ils utilisent un boîtier de contrôle implanté dans le module russe Zvezda. Ils pourront suivre, par écran interposé, les manoeuvres finales en direct.
28 mars, 22h31 TU, l'ATV s'amarre à ISS. Le cargo emporte outre les vivres, l'eau et le carburant une sé&ries d'équipements pour la station. Pour l'ESA, l'ATV emporte le LSM3 (Life Support Module oxygène) des gants en néoprène et une pince pour le Biolab, le bouclier ALTEA, l'expérience ENERGY et le ESEM pour le rack de charges utiles européen dans la station. Pour la JAXA, il emporte une caméra HD, des cassettes des câbles pour le module JEM. Pour la NASA, des nano racks équipés de fours et un calculateur de vitesse pour la ventilation. L'ATV emporte 4395 kg de fluide, dont 2261 kg d'ergols pour la mission et 3150 pour les reboost, 285 kg d'eau, 100 kg de gaz (O2 et air) et 860 kg de carburant pour ISS. A cela s'ajoutent 2201 kg d'équipements, soit un total de 6596 kg, un peu moins que l'ATV 2 (7091 kg).
Envoyer un DVD dans l’espace : c’est le projet fou que s’est fixé l’atelier multimédia d’une petite structure : la MJC d’Elbeuf. En partenariat avec le service jeunesse du CNES, ils ont réalisé un film baptisé « L’apprenti sage ». Le sujet de ce mini film est la vision de notre société par les jeunes générations et leurs espoirs en l’avenir. Les sujets environnementaux et l’avenir de notre planète y sont notamment traités. Un DVD renfermant le film a été chargé à bord de l’ATV 3 Edoardo Amaldi et sera diffusé à l'intérieur de la Station Spatiale Internationale avec le reste du fret. Les participants a ce projet n'ont malheureusement pas pu assister au tir a cause du report mais on pu profiter de leur séjour au CSG pour visiter la base.
L'équipage rentre dans l'ATV moins de 24
heures après son arrivée. Après égalisation de la pression entre
l'ATV et l'ISS et un nettoyage de l'air contenu dans ATV de par un
dispositif de purification d’air russe appelé POTOK, la trappe a
finalement été ouverte à 18:09 GMT. L’équipage est entré dans l'ATV et a
de suite procédé à plusieurs prélèvements d’air et à l'installation d’un
épurateur d'air (Kuiper via le US Grab sample container notamment).
Kononenko a quant à lui utilisé l'équipement standard dénommé (ECOSFERA)
afin de procéder à un échantillonnage microbiologique de l'air. Les
boites contenant les prélèvements ont ensuite été rangé dans le
conteneur KRIOGEM-03.

29 mars, le centre de contrôle de
Toulouse signale une anomalie électrique sur le canal de puissance
principal russe RECSC. Un canal de secours va être utilisé car le cargo
ne peut rester longtemps alimenter par ses propres batteries qui ne sont
pas rechargeables et la puissance électrique est nécessaire poiur
réaliser les manoeuvres de reboost de la station. La NASA a demandé que
la cargo soit déchargé le plus rapidement possible au cas ou le système
de secours ne fonctionnerait pas et que l'ATV doive quitter la station.
31 mars, le canal d'alimentation de secours a été connecté ce qui autorise les opérations de reboosts et le déchargement normal du vaisseau par l'équipage. Les quatre propulseurs principaux de l’ATV sont allumés durant 4 minutes et 51 secondes à partir de 21:54 TU, ceci permet d’élever le périgée de la Station de 3,2 Kilomètres. Le RECS #1 reste néanmoins désactivé pour le moment. Les contrôleurs de mission continueront à évaluer l'état du système afin de déterminer s’il peut être récupéré ou non. La cause principal de la défaillance n'est pas encore très clair, mais il est évoqué que le problème aurait été causé par un équipement d'épuration d’air (court circuit). Début avril, l'ATV réalise son premier reboost avec une mise à feu de ses moteurs durant 15 minutes. L'orbite est ainsi rehaussé de 3,86 kilomètres. Ce rehaussement va accroître l'apogée de l'ISS en vue du désamarrage du cargo Progress le 19 avril prochain et de l'arrivée en suivant de l'équipage de l'expédition 31. Les premiers transferts d'oxygène (represurisation dans le jargon ATV) et d'eau commence à bord de la Station sous le contrôle de l’équipage à bord et de l'astronaute de l'ESA André Kuipers. L’ATV-CC surveille ces opérations et s'assure notamment du fonctionnement nominal des systèmes de ventilation et de détection de feu. Mi avril, les équipes de l'ATV-CC et de l'ESOC réalise un test visant à démontrer la fiabilité d'une solution de back-up en cas de perte de communication avec le cargo. Il s'agit du Prox-Link, un équipement qui permet à l'ATV, lors de l'approche finale, d’envoyer de la télémétrie vers l’ISS et de recevoir des commandes depuis l’ISS. Pour les besoins de secours en cas de panne de communication avec les satellites relais, le Prox-Link peut être détourné de sa fonction première. La communication entre le Prox-Link et l’ATV-CC s’établie alors directement via trois stations sol de l’ESA à Redu (Belgique), Villafranca (Espagne) et Maspalomas (îles Canaries).
L'équipage de l'expédition 30 a pris la pose pour une photo souvenir à bord de l'ATV 3 Amaldi. 25 avril, les moteurs de l'ATV sont allumés pendant un peu plus de 16 minutes. Le but de la manoeuvre est de relever l'orbite de l'ISS de 4,1 kms. Cette opération, facilitera notamment le désamarrage du Soyouz TMA-22 qui ramènera sur Terre Dan Burbank, Anton Shkaplerov et Anatoly Ivanishin. Les trois astronautes resteront à bord de la Station. Début mai, les moteurs de l'ATV sont allumés durant 20 minutes et 21 secondes pour rehausser l'orbite de l'ISS (5,26 km) afin de permettre au Soyouz 30S de s'amarrer prochainement à la Station. Fin mai, les moteurs de l'ATV sont activés durant 6 minutes et 17 secondes, pour procéder à un rehaussement de l'altitude de la Station de 1,55 km, ISS se trouvant à l'heure actuelle à 399 kilomètres d'altitude. La veille, la nouvelle capsule Dragon avait rejoint la Station, s'amarrant nominalement. Space X devient ainsi la première société commerciale à ravitailler l'ISS. Mi juin, les moteurs de l'ATV sont sollicités durant 9 minutes et 20 secondes, pour augmenter l'altitude de la Station de 2,36 kilomètres. L'objectif est d'obtenir un phasage correct pour permettre dans les meilleures conditions le départ de la Station d'Oleg Kononenko, d'André Kuipers et de Don Pettit, à bord du capsule Soyouz. Ils atterriront dans les steppes du Kazakhstan le 1er juillet après 193 jours dans l'espace. Mi juillet, les moteurs de l'ATV sont activés pour mener un nouveau reboost de la Station. A l'issue d'une poussée de 19 minutes et 25 secondes, le réhaussement enregistré est de 4,98 km. 15 août, un nouveau reboost de l’ISS
est réalisé, mais la manœuvre est prématurément stoppée. L’impulsion
donnée est de l’ordre de 2,9 mètres par seconde au lieu des 4,4 m/s
initialement prévus à cause d'une anomalie détectée sur une partie du
système de propulsion de l’ATV. Cette partie du système n’a pas été
utilisée lors de ce reboost mais est surveillée en permanence. 22 août, ATV relève sans problème l’orbite de la Station, la portant à 416 kilomètres d’altitude moyenne (apogée de 427 kilomètres et périgée de 405), lors d’une double manœuvre. L’objectif était de préparer dans des conditions optimales le désamarrage du Soyouz TMA-04M, prévu pour le 17 septembre. L’anomalie rencontrée il y a quelques jours est un mauvais souvenir, le système de propulsion d’Amaldi fonctionnant nominalement. 19 kilos d’oxygène ont été transférés de l’ATV à la Station au cours d’une activité de repressurisation de près de 2h30. L’ATV dispose à son bord de deux lignes séparées constitués de trois réservoirs pouvant contenir de l’air, de l’oxygène ou de l’azote, l’air étant constitué d’azote et d’oxygène. Lors des missions ATV 1 Jules Verne et ATV 2 Johannes Kepler, seul de l’oxygène a été amené à la Station. Au chapitre des nouveautés sur la mission Amaldi, le vaisseau apporte de l’air sur une ligne et de l’oxygène sur l’ autre, à la demande des américains. Ce sont les américains et les russes qui gèrent la composition chimique de l’air à l’intérieur de la Station. Ce sont 100 kilos de gaz, stockés dans des réservoirs, qui sont livrés par l’ATV 3 à la Station. L’activité de repressurisation consiste à injecter ce gaz à l’intérieur de l’ISS. Aucun branchement n'est nécessaire. Les circuits de livraison du gaz sont coté ATV et le gaz est directement injecté dans la zone pressurisée et habitée de l’ATV qui communique avec la Station. A ce jour, l'ATV a effectué trois repressurisations de l’ISS avec de l’air. Tout l’air que l’ATV a amené a été transféré : 33 kg. Il reste le transfert de l’oxygène (environ 67 kg) qui n’est pas encore programmé. 14 septembre, L'ATV 3 relève l'orbite de la Station pour la dernière fois de sa mission. Ses moteurs sont activés pendant 536 secondes, plaçant l'ISS à une orbite moyenne de 424,8 kilomètres. L'objectif est de préparer dans des conditions optimales le départ du vaisseau russe Soyouz TMA-04M, prévu dans trois jours. Amaldi quittera définitivement l'ISS le 25 septembre. 25 septembre, les opérations de désamarrage sont annulés. Le processus a été stoppé avant son exécution suite à un problème à bord du module Zvezda. La trappe reliant l'ISS et l'ATV est maintenant fermée. Quelques heures avant, les derniers déchets de la Station ont été chargés à bord du cargo européen. A son bord se trouve également un voyageur extrêmement important : le REBR (ReEntry Breakup Recorder). ll s’agit d’un petit enregistreur qui recueillera l’ensemble des données pour les transmettre au sol, permettant de mieux comprendre le fonctionnement des véhicules lors de cette phase. Lors de la rentrée atmosphérique d'Amaldi, le REBR, protégé par un bouclier thermique, activera ses capteurs, recueillant des informations telles que la température ou la pression. Les données enregistrées seront ensuite transférées vers un satellite avant l’impact dans l’océan Pacifique. 27 septembre, La DAM, la manoeuvre d'évitement de débris, prévue aujourd'hui et qui devait utiliser les moteurs de l'ATV a été annulée ce matin. Le désamarrage de l'ATV 3 aura lieu le 29. 29 septembre, l'ATV 3 Edoardo Amaldi vient de quitter la Station. Il terminera sa mission en se détruisant par combustion - avec à son bord les déchets de l'ISS - lors d'une rentrée contrôlée au-dessus du Pacifique Sud. Lors de son départ, Amaldi affichait un poids de 14 058 kilos (pour près de 20 tonnes au décollage). Au cours de sa mission, il a délivré 2200 kg de cargo sec, 284 kg d'eau, 66.5 kg d'oxygène et 33 kg d'air. 4 octobre, à l’issue d’une rentrée contrôlée dans l’atmosphère, le cargo européen termine sa mission. Du côté du centre de contrôle toulousain, la fin d’une mission entraîne le début d’une autre. L’ATV 4 baptisé Einstein est dores-et-déjà en préparation. La formation des nouveaux opérateurs est enclenchée tandis que les premières simulations débuteront sous peu.
A peine l'ATV 3 était sur orbite que l'ESA annonce sa
décision de ne pas prolonger la production des cargos au-delà de la 5e
unité. L'annonce provoque l'étonnement et la déception, car le programme est
un succès et que les équipes se tenaient prêtes à démarrer la construction
de deux unités supplémentaires. L'ESA en profite pour tester des
technologies d'approche et de caractérisation laser pour de futures missions
entre satellites ou vers des stations.
|