|
|
|
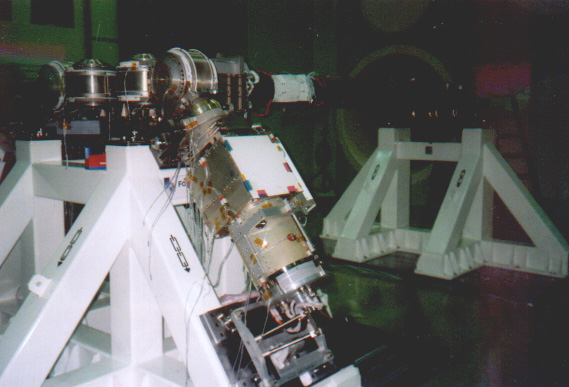
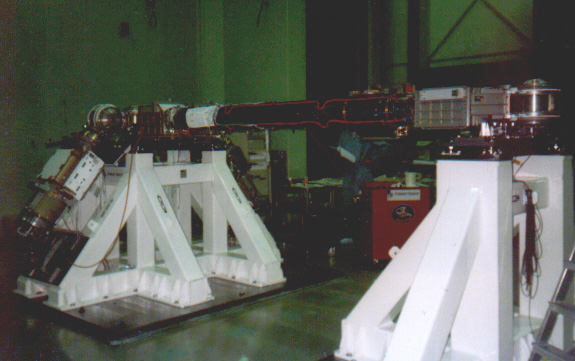
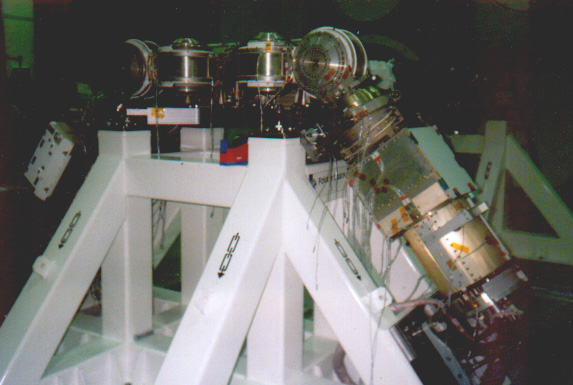
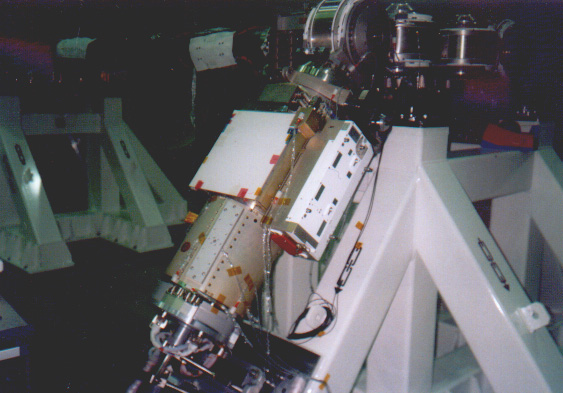
ERA Le bras manipulateur européen est bâti sur un concept tout-à-fait original et unique qui en fait un engin d'exception très différent du bras manipulateur principal de la station ou de son homologue de la navette spatiale américaine. A chaque extrémité de ce manipulateur symétrique de 10 mètres se trouve un organe préhenseur identique. Son utilisation alternée en tant que "pied" et "main" permet au bras de se déplacer d'un point d'ancrage à un autre à la manière d'une chenille arpenteuse. Ces organes sont conçus pour saisir et relâcher des charges utiles équipées d'un dispositif standard d'accrochage, pour mesurer des forces et des couples, ainsi que pour transmettre des signaux électriques, de donnés ou de vidéo des charges utiles qu'ils ont saisies. Ces organes préhenseurs sont aussi équipés d'un outil de service intégré que l'on pourrait comparer à un tournevis universel. Il peut également recevoir une plate-forme comportant cale-pieds et mains courantes et transporter des astronautes lors de sorties extra-véhiculaires.
L'ERA sera mis en œuvre à partir d'un dispositif d'ancrage monté sur une petite plate-forme mobile capable de se déplacer le long de rails longeant la structure de la plate-forme russe scientifique et d'énergie. En se déplaçant d'un point d'ancrage à un autre, répartis sur d'autres élément de la station, l'ERA élargit considérablement sa zone d'intervention. Le bras manipulateur européen est conçu pour être aussi bien commandé par un astronaute en activité extra-véhiculaire que pour être activé depuis l'intérieur de la station. Toutes ses tâches peuvent être pré-programmées, de sorte qu'il suffit de les lancer puis de contrôler visuellement son action. Le coût de la participation européenne est actuellement estimé à 3 milliards de dollars.
|
||||||