|
Le système Operational TeleVision
La couverture télévisuelle de
tous les lancements Apollo Saturn 5 est nécessaire pour les opérations en
temps réel, les analyses détaillées et l' information grand public à
travers les différents centres NASA. Le système OTV Operational Television
utilise des caméras télécommandées à grand degrés de liberté et
équipées de zoom gérées depuis la salle CCR (Communication Control Room) du LCC. Cet équipement permet de couvrir les
événements pendant la préparation du lancement et le lancement jusqu' à
400 m d' altitude. Dans la salle de tir, les caméras OTV sont affichées sur 60
écrans TV visible en même temps. Les vues arrivent aussi bien des
plateformes 1 et 2 des grandes baies du VAB, de la MSS ou des pads A et B.
Les caméras sur les LUT, la MSS et le pad sont commandées depuis le LCC. Les
LUT abrite 27 caméras chacun, la tour MSS 12, les pad 24 et le VAB 5. A noter la caméra 60 sur le
toit du VAB coin SE observant la Crawlerway,
les pad, le Kennedy Parkway pour la couverture du transfert des astronautes
vers le pad, et le quai de déchargement.
 |
| Une caméra OTV
du KSC en forme de tube (56 cm sur 15,6) avec lamelle de
maintien de la plaque support. C'est une Cosmicar TV lens ES
50mm 1:1.8, fabriqué au Japon, manufacturée par RCR
Closed-Circuit Video Equipment Model No. TC1006/CI4 Serial No. [stamped]
010183 |
Des caméras sont installées
sur 6 sites autour du périmètre du pad (J8-1512, 1714, 1961, 1956, 1703et
1554) à 400 m du pad permettant de surveiller les activités de pré lancement
selon plusieurs angles de vues. Chacun des 6 sites ont une route d'accès, 5
dalles en béton pour les caméras, un poteau de cible, des boites de
communication et de distribution électrique. Les sites couvrent les
activités de pré lancement et les opérations de lancement suivant 6 angles
de vues à 400 m du lanceur.
Sur chacune des 5 dalles
bétonnées se trouvent 6 caméras, 4 caméras d'engineering séquentielle et une
caméra CZR (Fixed High Speed Metric Camera. Les 4 dalles des caméras
séquentielle mesurent 1,8 m de large sur 4,8 m de longueur et sont disposées
en ligne et en vue du lanceur. Le site est à 5,4 m au dessus du niveau de la
mer et à 3 m au dessus de la route bordant le pad. La dalle support de la
caméra CZR mesure 1,8 m sur 3 m de longueur et à 7,6 m de la plus proche
caméra d'engineering. Une place de parking permet de garer le tracteur du
CZR. Le poteau de cible sert pour l'alignement optique de la caméra CZR. Il
est à 70 m de distance à 26 m de hauteur.
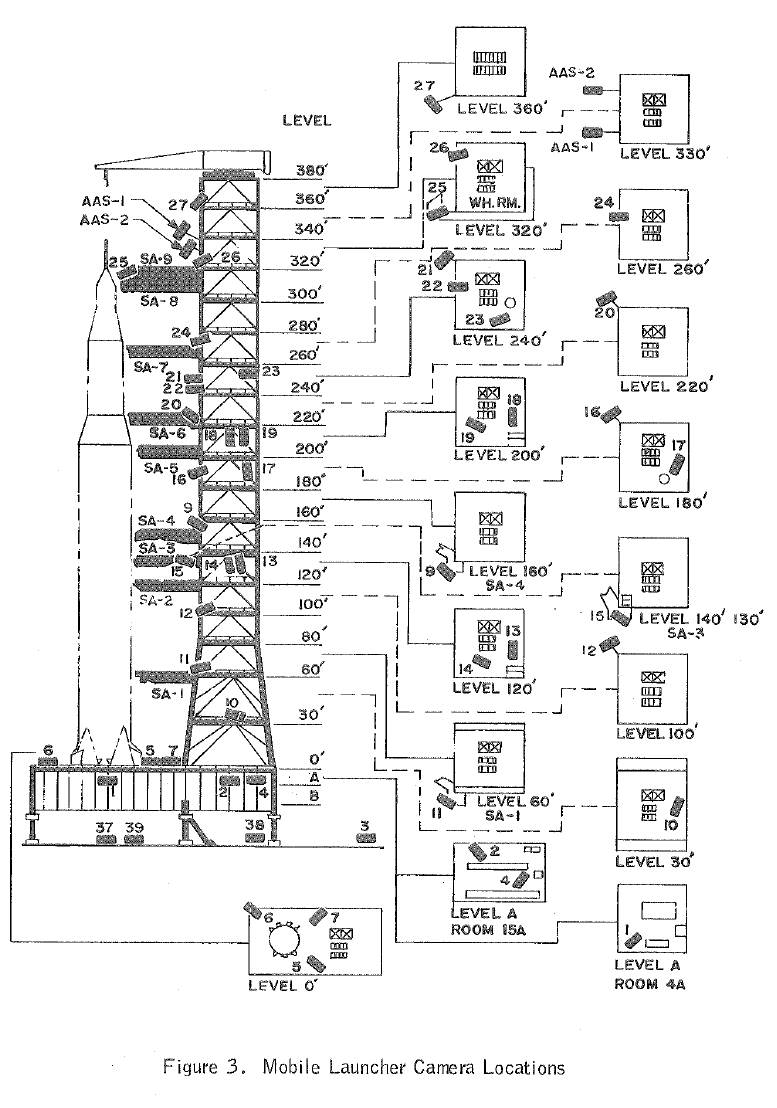
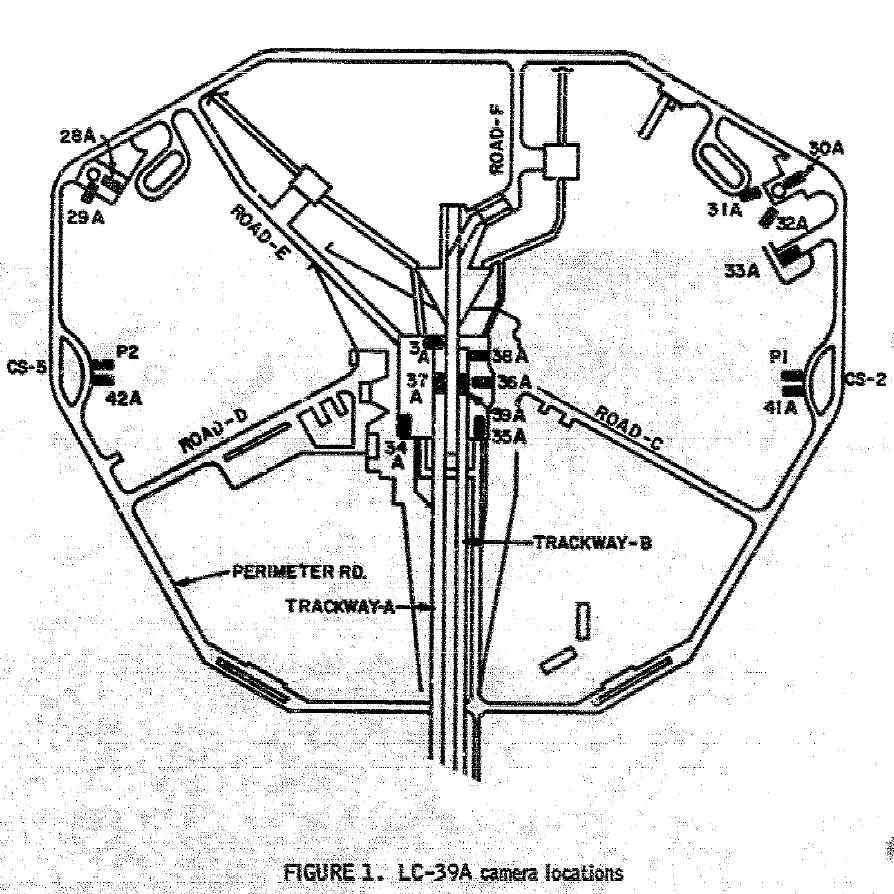
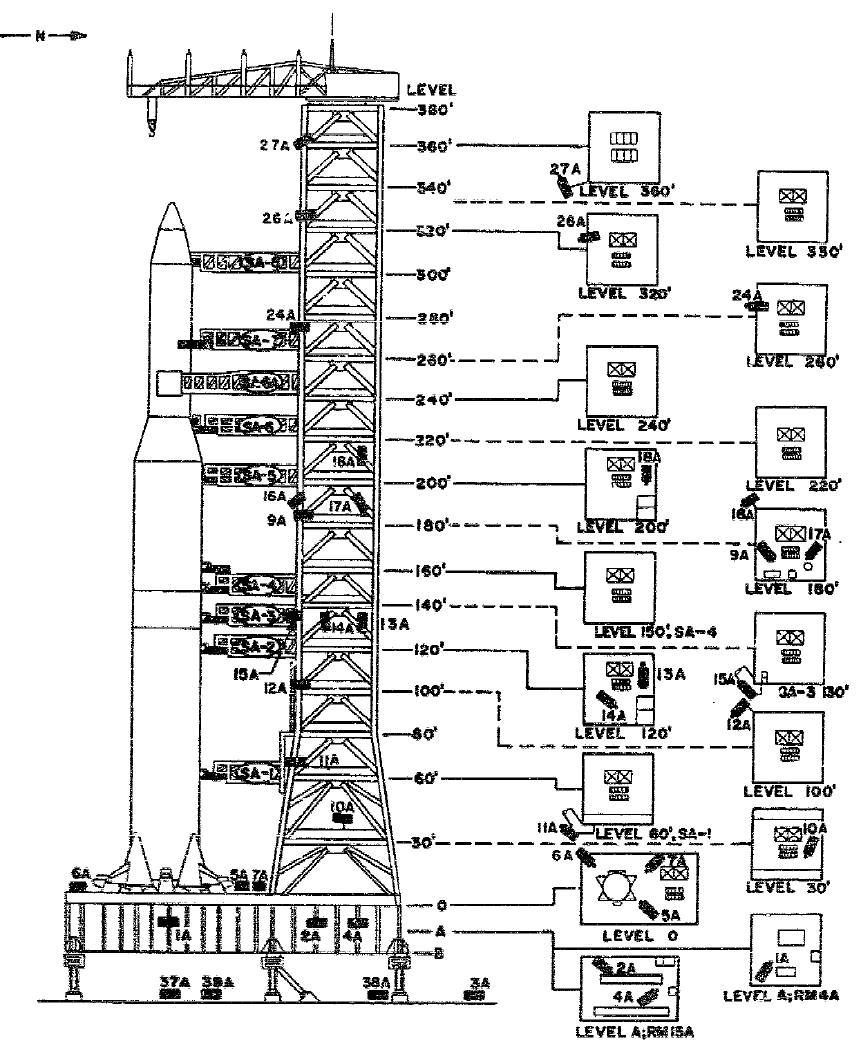
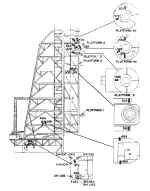
Emplacement des caméras sur le
pad 39 Emplacement des caméras sur le
Mobil Launcher
| CAMERAS |
EMPLACEMENT |
COUVERTURE |
| AAS1 |
ML
niveau 330 coté Sud |
Lanceur
et bras de service |
| AAS2 |
ML
niveau 330 coté Sud |
Lanceur
et bras de service |
| AAS3 |
Périmètre
LC39 site 2 |
Lanceur
complet et début de l' ascension |
| AAS4 |
Périmètre
LC39 site 5 |
Lanceur
complet et début de l' ascension |
| 1 |
ML
salle 4AB |
Unité
hydraulique |
| 2 |
ML
salle 15A |
Panneau
de maintenance computer RC110 |
| 3 |
Pad coté NO au
bord de la tranchée |
Déflecteur de
flamme, connexion ligne LH2/ML, connexion ligne LOX/ML et lignes
de ventilation H2 ML coté 3 |
| 4 |
ML
salle 15A |
Computer
RC110 |
| 5 |
ML
niveau 0, coin E |
Mat
de service 1 et 2 |
| 6 |
ML
niveau 0 coin SO |
Mat
de service 3 et 4 |
| 7 |
ML
niveau 0 coin O |
Mat
de service 3 et 2 et accès du personnel sur le ML |
| 9 |
ML
niveau 160, coin SE |
Isolation
thermique du S2 |
| 10 |
ML
niveau 30, coin N |
Complexe
valve LOX |
| 11 |
ML
niveau 60, coin SE |
Plancher
du ML, étage S1C et bras de service 1 |
| 12 |
ML
niveau 100, coin SE |
Plancher
ML, étage S1C et bras de service 2,3 et 4 |
| 13 |
ML
niveau 120 coté N |
Complexe
valve LH2 |
| 14 |
ML
niveau 120 coté E |
Complexe
valve LOX |
| 15 |
ML
niveau 130 coin SE |
Bras
de service 4 et2 |
| 16 |
ML
niveau 180, coin SO |
Bras
de service 4, 5 et 6, isolation thermique S2 |
| 17 |
ML
niveau 180 coté N |
Canalisations
et échangeur de chaleur LH2 |
| 18 |
ML
niveau 200 coté N |
Complex
valve LH2 |
| 19 |
ML
niveau 200 coté E |
Complexe
valve LOX |
| 20
|
ML
niveau 220 coin SO |
Installation
périmètre Ouest, stockage LOX arivée des paniers à glissière, bras
de service 6 et 7 et étage S4B |
| 21 |
ML
niveau 240 coin SO |
Bras
de service 6, étage S4B, ombilical LH2 et installation
périmètre Ouest, stockage LOX arivée des paniers à glissière |
| 22 |
ML
niveau 240 coté S |
bras
de service 6 et7, étage S4B et bras de service 5, étage S2 |
| 23 |
ML
niveau 240 coté E |
Echangeur
de chaleur LH2 et panneau de valve |
| 24 |
ML
niveau 260 coté S |
Bras
de service 6, 7, 8 et S4B |
| 25 |
ML
320 salle blanche du CM |
intérieur
de la salle blanche et du CM |
| 26 |
ML
niveau 320 coté S |
Bras
de service 9, CSM |
| 27 |
ML
niveau 360 coin SE |
Bras
de service 8 et 9, CSM et LM et installation de stockage LH2 sur le
périmètre |
| 28 |
Périmètre
LC39 stockage LO2 |
Pompes,
valves et canalisations |
| 29 |
Périmètre
LC39 stockage LO2 |
Pompes,
valves et canalisations allant vers le pad |
| 30 |
Périmètre
LC39 stockage LH2 |
Vaporisateur
LH2, canalisations et valves |
| 31 |
Périmètre
LC39 site 1 |
Réservoir
LH2, valves et canalisations allant vers le pad |
| 32 |
Périmètre
LC39 site 1 |
Réservoir
LH2, valves et canalisations allant vers le pad |
| 33 |
Périmètre
LC39 stockage RP1 |
Pompes
RP1, valves et canalisations |
| 34 |
Pad 39 coin SO |
Lanceur et
écoulement de l' eau de refroidissement sur les bras de service, vue
des ascenseur d' accès au ML et de la zone de production d' eau |
| 35 |
Pad 39 coin SE |
Unité de
transfert RP1, coté 1 du ML |
| 36 |
Pad 39 centre
Est |
Lignes d'
arrivée LH2, coté 4 du ML |
| 37
|
Pad 39 coté O
de la tranchée |
Bas de l'
étage S1C et chambre des moteurs F1 |
| 38 |
Pad 39 coté NO |
Lignes d'
arrivée LH2, coté 4 du ML, le lanceur et la connexion ligne LH2/ML |
| 39 |
Pad 39 coté E
de la tranchée |
Moteur F1 |
| 41 |
Périmètre
LC39 site 2 |
Poursuite
du lanceur jusqu' à 300 m d' altitude |
| 42 |
Périmètre
LC39 site 5 |
Poursuite
du lanceur jusqu' à 300 m d' altitude |

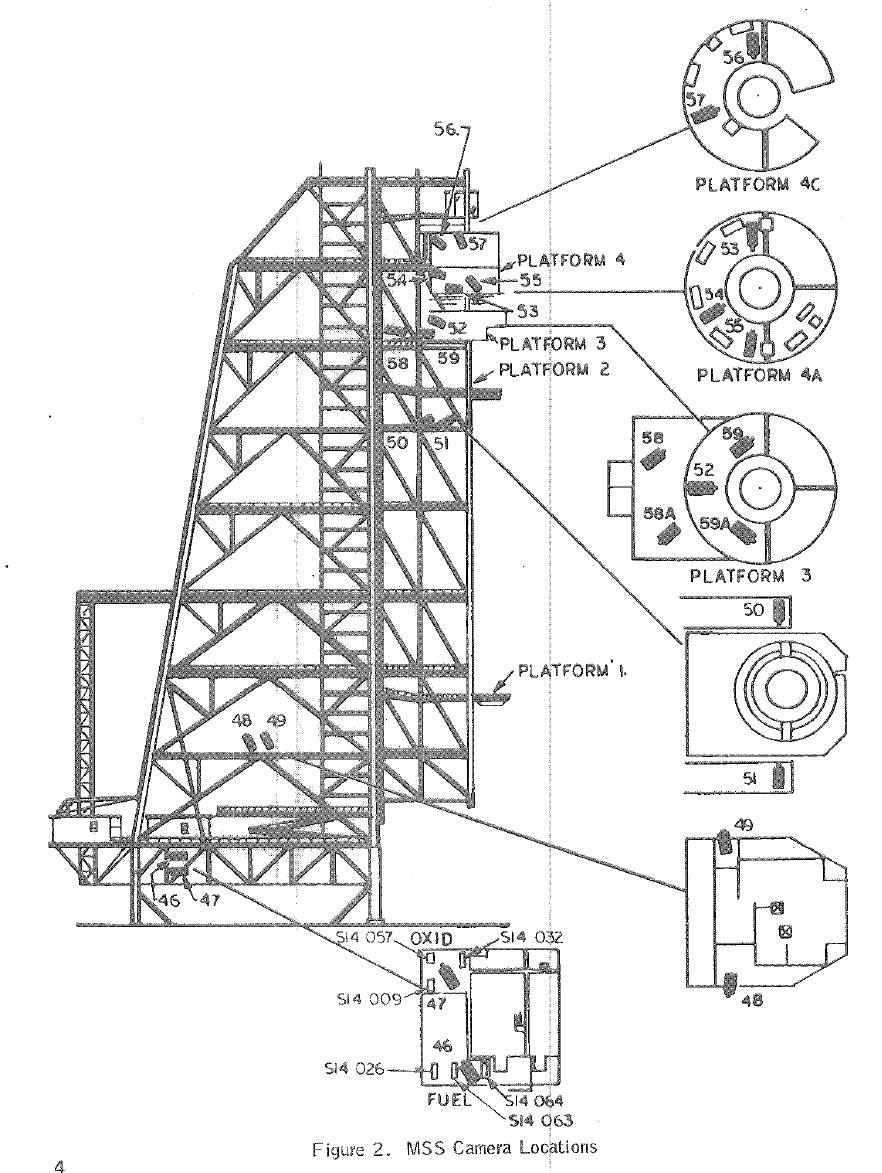
Emplacement des caméras sur la
tour MSS
| CAMERAS |
EMPLACEMENT |
COUVERTURE |
| 46 |
MSS niveau 22 coté E |
Unité de distribution
carburant RCS CSM LM |
| 47 |
MSS niveau 22 coté O |
Unité de distribution
oxydant RCS |
| 48 |
MSS niveau 44 coté E |
Unité de stockage
carburant et pad coté E |
| 49 |
MSS niveau 44 coté O |
Unité de stockage oxydant
et pad coté O |
| 50 |
MSS niveau 224 coté O |
Etage S4B (système APS) |
| 51 |
MSS niveau 224 coté E |
Etage S4B (système APS) |
| 52 |
MSS niveau 3A |
SLA |
| 53 |
MSS niveau 4A |
Moteurs RCS du SM |
| 54 |
MSS niveau 4A |
SM |
| 55 |
MSS niveau 4A |
SM |
| 56 |
MSS niveau 4C |
CM ombilical d'
alimentation |
| 57 |
MSS niveau 4C |
CM |
| 58 |
MSS niveau 3A |
Plateforme de pesé
carburant |
| 59 |
MSS niveau 3A |
Zone carburant et oxydant |
Pour les missions Skylab, les
emplacements changent un peu du fait de l' utilisation de deux pad de tir et
de deux ML différents.
Tableau des emplacements des 36
caméras pour Skylab 1, LC 39A et ML2.
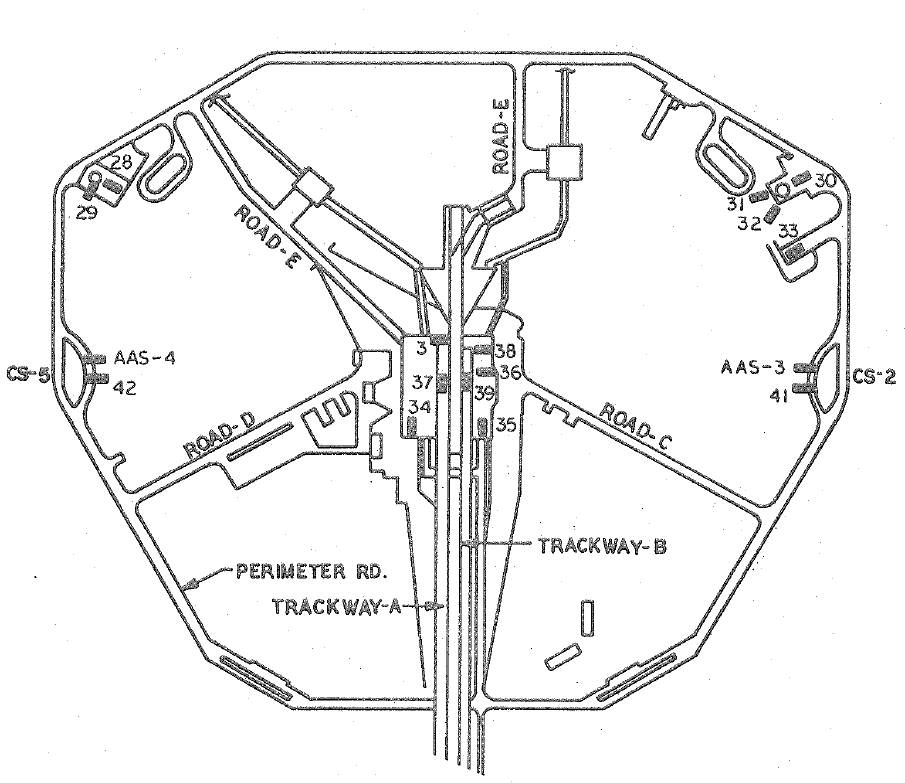
Emplacement des caméras sur le
pad
39A Emplacement des caméras sur le
Mobil Launcher 2
| CAMERAS |
EMPLACEMENTS |
COUVERTURE |
| P1 |
Périmètre LC39 site 2 |
Lanceur, bras de service |
| P2 |
Périmètre LC39 site 5 |
Lanceur, bras de service |
| 1A |
ML
salle 4AB |
Unité
hydraulique |
| 2A |
ML
salle 15A |
Panneau
de maintenance computer RC110 |
| 3A |
Pad coté NO au
bord de la tranchée |
Déflecteur de
flamme, connexion ligne LH2/ML, connexion ligne LOX/ML et lignes
de ventilation H2 ML coté 3 |
| 4A |
ML
salle 15A |
Computer
RC110 |
| 5A |
ML
niveau 0, coin E |
Mat
de service 1 et 2 |
| 6A |
ML
niveau 0 coin SO |
Mat
de service 3 et 4 |
| 7A |
ML
niveau 0 coin O |
Mat
de service 3 et 2 et accès du personnel sur le ML |
| 9A |
ML
niveau 160, coin SE |
Isolation
thermique du S2 |
| 10A |
ML
niveau 30, coin N |
Complexe
valve LOX |
| 11A |
ML
niveau 60, coin SE |
Plancher
du ML, étage S1C et bras de service 1 |
| 12A |
ML
niveau 100, coin SE |
Plancher
ML, étage S1C et bras de service 2,3 et 4 |
| 13A |
ML
niveau 120 coté N |
Complexe
valve LH2 |
| 14A |
ML
niveau 120 coté E |
Complexe
valve LOX |
| 15A |
ML
niveau 130 coin SE |
Bras
de service 4 et2 |
| 16A |
ML
niveau 180, coin SO |
Bras
de service 4, 5 et 6, isolation thermique S2 |
| 17A |
ML
niveau 180 coté N |
Canalisations
et échangeur de chaleur LH2 |
| 18A |
ML
niveau 200 coté N |
Complex
valve LH2 |
| 24A |
ML
niveau 260 coté S |
Bras
de service 6, 7, 8 et porte d' accès IU |
| 26A |
ML
niveau 320 coté S |
Sommet
de l' aspergeur d' eau |
| 27A |
ML
niveau 360 coin SE |
Bras
de service 8 et amortisseur primaire |
| 28A |
Périmètre
LC39 stockage LO2 |
Pompes,
valves et canalisations |
| 29A |
Périmètre
LC39 stockage LO2 |
Pompes,
valves et canalisations allant vers le pad |
| 30A |
Périmètre
LC39 stockage LH2 |
Vaporisateur
LH2, canalisations et valves |
| 31A |
Périmètre
LC39 site 1 |
Réservoir
LH2, valves et canalisations allant vers le pad |
| 32A |
Périmètre
LC39 site 1 |
Réservoir
LH2, valves et canalisations allant vers le pad |
| 33A |
Périmètre
LC39 stockage RP1 |
Pompes
RP1, valves et canalisations |
| 34A |
Pad 39 coin SO |
Lanceur et
écoulement de l' eau de refroidissement sur les bras de service, vue
des ascenseur d' accès au ML et de la zone de production d' eau |
| 35A |
Pad 39 coin SE |
Unité de
transfert RP1, coté 1 du ML |
| 36A |
Pad 39 centre
Est |
Lignes d'
arrivée LH2, coté 4 du ML |
| 37A |
Pad 39 coté O
de la tranchée |
Bas de l'
étage S1C et chambre des moteurs F1 |
| 38A |
Pad 39 coté NO |
Lignes d'
arrivée LH2, coté 4 du ML, le lanceur et la connexion ligne LH2/ML |
| 39A |
Pad 39 coté E
de la tranchée |
Moteur F1 |
| 41A |
Périmètre
LC39 site 2 |
Poursuite
du lanceur jusqu' à 300 m d' altitude |
| 42A |
Périmètre
LC39 site 5 |
Poursuite
du lanceur jusqu' à 300 m d' altitude |
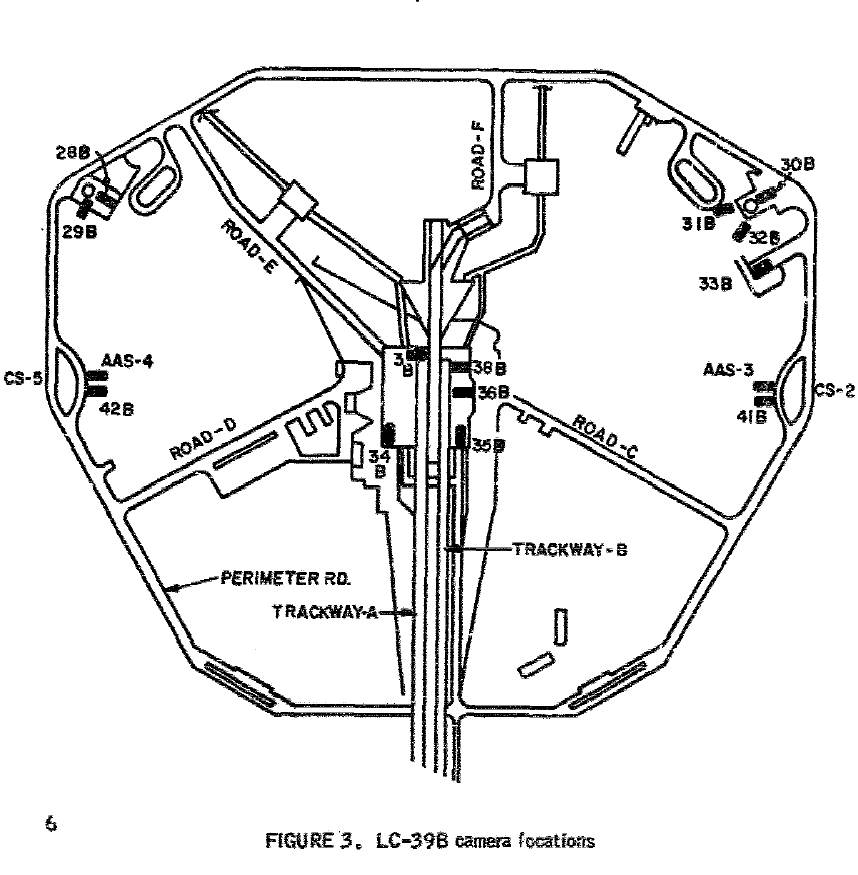
Tableau des emplacements des 36
caméras pour Skylab 2,3, 4 ET ASTP, LC 39B et ML1.
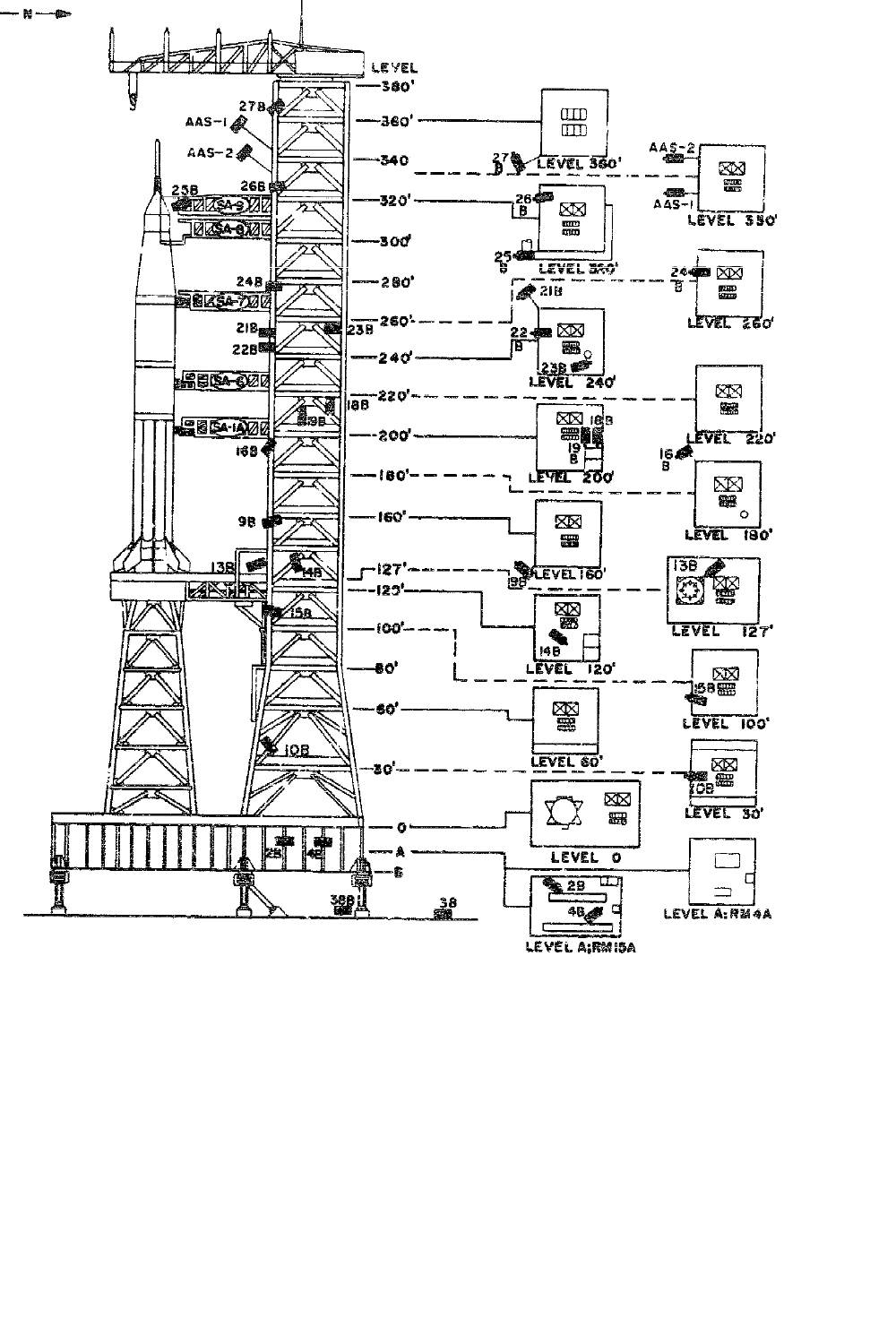
Emplacement des caméras sur le pad
39B Emplacement des caméras sur le
Mobil Launcher 1
| CAMERAS |
EMPLACEMENT |
COUVERTURE |
| AAS1 |
ML
niveau 330 coté Sud |
Lanceur
et bras de service |
| AAS2 |
ML
niveau 330 coté Sud |
Lanceur
et bras de service |
| AAS3 |
Périmètre
LC39B site 2 |
Lanceur
complet et début de l' ascension |
| AAS4 |
Périmètre
LC39B site 5 |
Lanceur
complet et début de l' ascension |
| 2B |
ML
salle 15A |
Panneau
de maintenance computer RC110 |
| 3B |
Pad coté NO au
bord de la tranchée |
Déflecteur de
flamme, connexion ligne LH2/ML, connexion ligne LOX/ML et lignes
de ventilation H2 ML coté 3 |
| 4B |
ML
salle 15A |
Computer
RC110 |
| 9B |
ML
niveau 160, coin SE |
Etage
S1B, mat de service RP1, plancher du Milkstool |
| 10B |
ML
niveau 30, coin N |
Moteur
H1 et plateforme de travail |
| 13B |
ML
niveau 127 coté N |
Plancher
du Milkstool et ailerons S1B |
| 14B |
ML
niveau 120 coté E |
Complexe
valve LOX |
| 15B |
ML
niveau 100 coin S |
Etage
S1B valve RP1 |
| 16B |
ML
niveau 180, coin SO |
Bras
de service 1A et 6, mat de service LOX et plancher du Milkstool |
| 18B |
ML
niveau 200 coté N |
Complex
valve LH2 |
| 19B |
ML
niveau 200 coté E |
Complexe
valve LOX |
| 21B |
ML
niveau 240 coin SO |
Bras
de service 6, étage S4B, ombilical LH2 et installation
périmètre Ouest, stockage LOX arivée des paniers à glissière |
| 22B |
ML
niveau 240 coté S |
bras
de service 6 étage S4B |
| 23B |
ML
niveau 240 coté E |
Echangeur
de chaleyur LH2 et panneau de valve |
| 24B |
ML
niveau 260 coté S |
Bras
de service 6 et 7 S4B, porte d' accès IU, bras de service 8 |
| 25B |
ML
320 salle blanche du CM |
intérieur
de la salle blanche et du CM |
| 26B |
ML
niveau 320 coté S |
Bras
de service 9, CSM |
| 27B |
ML
niveau 360 coin SE |
Bras
de service 8 et 9, CSM et LM et installation de stockage LH2 sur le
périmètre |
| 28B |
Périmètre
LC39B stockage LO2 |
Pompes,
valves et canalisations |
| 29B |
Périmètre
LC39B stockage LO2 |
Pompes,
valves et canalisations allant vers le pad |
| 30B |
Périmètre
LC39B stockage LH2 |
Vaporisateur
LH2, canalisations et valves |
| 31B |
Périmètre
LC39B site 1 |
Réservoir
LH2, valves et canalisations allant vers le pad |
| 32B |
Périmètre
LC39B site 1 |
Réservoir
LH2, valves et canalisations allant vers le pad |
| 33B |
Périmètre
LC39B stockage RP1 |
Pompes
RP1, valves et canalisations |
| 34B |
Pad 39B coin SO |
Lanceur et
écoulement de l' eau de refroidissement sur les bras de service, vue
des ascenseur d' accès au ML et de la zone de production d' eau |
| 35B |
Pad 39B coin SE |
Unité de
transfert RP1, coté 1 du ML |
| 36B |
Pad 39B centre
Est |
Lignes d'
arrivée LH2, coté 4 du ML |
| 38B |
Pad 39B coté
NO |
Lignes d'
arrivée LH2, coté 4 du ML, le lanceur et la connexion ligne LH2/ML |
| 41B |
Périmètre
LC39B site 2 |
Poursuite
du lanceur jusqu' à 300 m d' altitude |
| 42B |
Périmètre
LC39B site 5 |
Poursuite
du lanceur jusqu' à 300 m d' altitude |
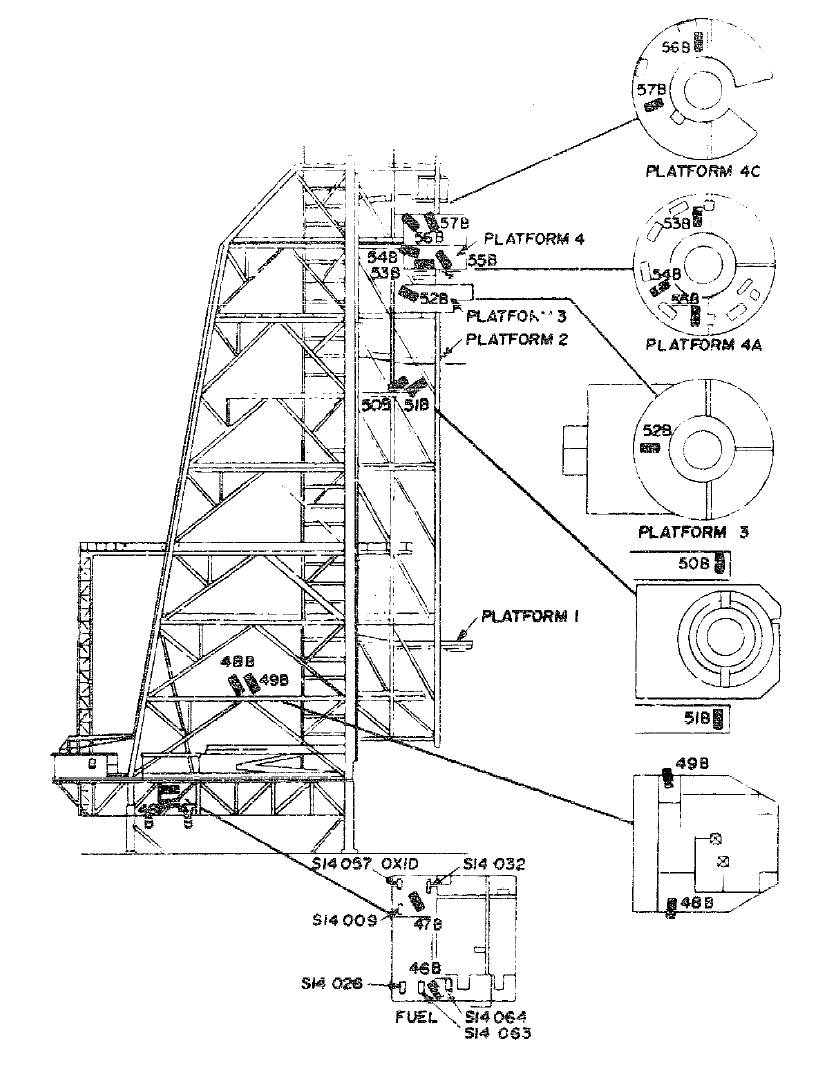
Emplacement des caméras sur la
tour MSS
| CAMERAS |
EMPLACEMENT |
COUVERTURE |
| 46 |
MSS niveau 22 coté E |
Unité de distribution
carburant RCS CSM LM |
| 47 |
MSS niveau 22 coté O |
Unité de distribution
oxydant RCS |
| 48 |
MSS niveau 44 coté E |
Unité de stockage
carburant et pad coté E |
| 49 |
MSS niveau 44 coté O |
Unité de stockage oxydant
et pad coté O |
| 50 |
MSS niveau 224 coté O |
Etage S4B (système APS) |
| 51 |
MSS niveau 224 coté E |
Etage S4B (système APS) |
| 52 |
MSS niveau 3A |
SLA |
| 53 |
MSS niveau 4A |
Moteurs RCS du SM |
| 54 |
MSS niveau 4A |
SM |
| 55 |
MSS niveau 4A |
SM |
| 56 |
MSS niveau 4C |
CM ombilical d'
alimentation |
| 57 |
MSS niveau 4C |
CM |
Documents et phots NASA mai 1971
et août 1973
LE SYSTEME OPTIQUE
Le système de prises de
vue optique LOA (launch operations area) permet la prise de vue de film
documentaire et d'engineering lors de chaque lancement. Le système
comprend pas moins de 130 caméras à film (16, 35 et 70 mm)
automatique ou manuelle réparties sur les LUT, le pad de tir, les 6
sites en bordure du pad et 18 sites dits "universel", Universal Camera
Site UCS.
Les caméras montés sur le LUT et le pad sont
gérées depuis le PTCR "pad terminal connection room" et le LCC.
Elles sont montées sur différents supports selon
leur situation, pieds fixes ou mobiles. Les images prises permettent par la suite
d'analyser les performances du véhicule. Les images hautes vitesse
permettent de voir les séquences d'allumage des moteurs, les
déplacements dans le temps des parties mécaniques sur le lanceur et sur
les structures au sol et les interactions avec les éléments extérieurs,
les "engineering motion picture footage". le système assure enfin
des prises de vue d'excellente qualité pour la presse, les médias et le
public.
CAMERA SUR LE PAD
|
CAMERA |
POSITION |
VUES |
| E
39 |
|
 |
| E
50 |
|
 |
| E
61 |
|
 |
| E 8 |
|
 |
| E 9 |
|
 |
| |
|
|
CAMERAS AUTOUR DU PAD
Six sites sont réparties
autour des pad 39A et B afin de couvrir les opérations de pré lancement et
de lancement avec 6 angles de vues différents à 400 mètres de distance. Le
site 1 est au N-E, le site 2 à l'Est, le site 3 au S-O, le site 4 au S-O, le
site 5 à l'Ouest et le site 6 au N-O. 3 sites ont des caméras de poursuite
en vol. Cependant, la majorité des caméras placées sur ces sites sont fixes.
Les caméras assurent la prise de vue juste avant le lancement, au décollage,
en vol jusqu'à 400 d'altitude et en cas de déviations de trajectoire.
Les caméras installés sur ces
sites permettent des vues à grandes vitesse. Chaque film est "time codés"
sur le coté droit. La mise au point est faite en manuel comme l'exposition.
Les caméras sur les istes autour du pad permettent la surveillance du site
dès T-17 heures. Les caméras de poursuite assurent le suivit en vol. Chacune
est équipée d'une installation de poursuite mobile, de caméras de TV et 4
films optique au minimum. La caméra TV est connecté à une console dans le
LCC. L'opérateur peut ainsi voir au travers d'un écran et contrôler la
position de sa caméra. un opérateur, une camera, une unité de poursuite sont
nécessaire sur chacun des 3 sites autour du pad. Chaque site est équipé avec 4 caméras
techniques à grande vitesse et une caméra fixe à grande vitesse CZR. Les
caméras CZR ont été fabriqué par Navitar et sont équipées d'objectif 259 mm.


|
CAMERA |
POSITION |
VUES |
| E 11, site 1 |
 |
 |
| |
 |
|
| |
 |
|
| |
 |
 |
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
 |
|
| E 12, site 2 |
 |
 |
| E 4, site 2 |
 |
 |
| site 2 |
 |
|
| site 2 |
 |
 |
| site 2 |
 |
 |
| Site 2, tracking |
 |
|
| |
|
|
| Site 3 |
 |
|
| Site 3 |
 |
|
| |
|
|
| Site 4 |
 |
|
| Site 4 |
 |
|
| Site 4 |
 |
 |
| |
|
|
| E 6, site 5 |
 |
 |
| Site 5 |
 |
|
| Site 5 |
 |
|
| |
|
|
| Site 6 |
 |
 |
| |
 |
 |
| |
 |
 |
| |
|
|
CAMERAS DE POURSUITE
18 sites dits universels, UCS
répartis sur l'ensemble de la base spatiale assurent la prise de vue lors
des lancements de Saturn 5. Excepté le site UCS 6, toutes les vues sont
opérationnelles. Ils permettent la mise en place d'une caméra balistique et
d'une de ces 3 types de caméras, les MCC (Mobile Cinethéodolite Camera), les
MOT (Mobile Optical Tracker) et les IFLOT (Intermediate Focal Lengh Optical
Tracker).
Chaque site est fait en béton
armé (résistance en charge roulante de 4 tonnes) et mesure 6 m de large sur
sur 15 m de long. Sur un coté se trouvent les caméras MCC, MOT et IFLOT de
l'autre la caméras balistiques.
Le socle pour la caméra
balistique, dits "T pad" est isolé du sol avec un matériaux isolant de 2,5
cm qui assure aussi le drainage. La caméra est montée sur 6 fentes espacées
de 60° autour d'un marqueur repère près du centre. Le socle des caméras MCC
se compose de guides en béton assurant sa stabilité et l'isolant de tout
interférence extérieure. Les cameras sur les UCS 3,4, 7, 8, 12 et 15 peuvent
être télécommandées.
La caméra balistique comme la
Wild BC 4 est un appareil extrêmement précis utilisant des expositions
multiples sur la même plate photographique pour enregistrer la trajectoire
du lanceur.
MCC Mobile Cinethéodolite Camera
Les caméras cinéthéodolites
sont des appareils avec des films 35 mm équipés d'objectifs de 1,2 à 3 m de
focale travaillant à 30 images par secondes. Chaque image enregistre l'angle
d'élévation et d'azimut et le temps et parfois une grille définissant l'axe
de l'instrument. Dans les années 1990, ils seront remplacés par les nouveau
KTM KinetoTracking Mount.
MOTS Mobile Optical Tracking System
Le MOTS est un pied de
poursuite monté sur un camion et qui est capable de porter des caméras avec
un objectif jusqu'à 457 cm de focale. il utilise un système de guidage
électrique, un suiveur automatique associé à un circuit de TV interne (2
caméras grand et petit angle montées coaxiale).
IFLOT Intermediate Focal Lengh Optical
Tracker
|
CAMERA |
POSITION |
VUES |
| E207 |
 |
 |
| E215 |
 |
 |
| E76 |
 |
 |


ALOTS
L' Airborne Lightweight
Optical Tracking System (ALOTS) fait partie du réseau ARIA (Apollo Range
Instrumented Aircraft). C'est un système de caméras embarquée dans un avion
militaire afin de suivre les lancements de fusées et la rentrée des cabines
spatiales sur terre. L'ALOTS a été mis au point pour le programme Apollo en
1967 afin de parer aux limitations physiques et atmosphériques des systèmes
de caméras au sol.

Il est constitué d'un "pod"
de 6,6 m de longueur sur 1,8 m de diamètre monté sur le coté du fuselage
d'un EC-135 (B 707 modifié). Ce pod abrite deux caméras TV et un télescope
de 500 mm de focale. La caméra est équipée d'un film en 70 mm opérant à 30
images secondes (300 m de film) entre T+50 et T+ 200 secondes, permettant de
suivre la séparation du S1C et l'éjection de la tour LES. Le télescope est
capable de photographier une cible de 3,5 à 350 km de distance. L'avion est
en vol à 12 000 m d'altitude au S-E du Cape avec à son bord une équipe de 8
techniciens. Le pod peut bouger de haut en bas sur 270°, les mouvements en
latéral étant limités par la fénêtre. Le suivit est fait par la caméra Tv
qui par contraste se cale sur la fusée en vol. Dans l'avion, un opérateur
peut aussi suivre manuellement la fusée grâce à un joystick. 4 avions de ce
types ont été convertit en ALOTS pour la NASA Ils ont été utilisés pour la
première fois sur Apollo 7. Les avions ALOTS servent aussi pour suivre la
rentrée des cabines Apollo et les éclipse de soleil au dessus la Floride.

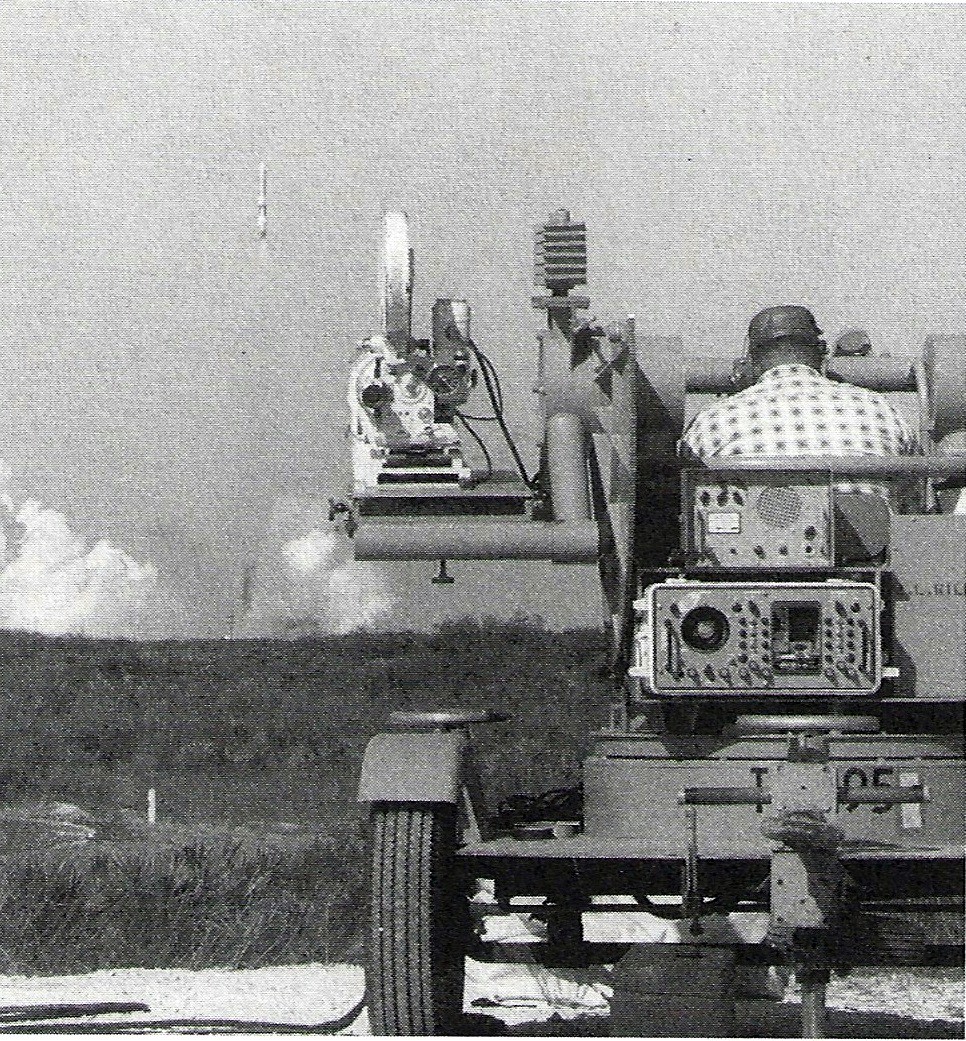
Célèbre photo montage pris par
un avion ALOST en octobre 1968 pour le lancement d'Apollo 7 ou l'on voit le
Saturn 1B et le VAB pris tout deux à la même distance. Le VAB est à 45 km
vers le SE et le lanceur à 2500 m d'altitude. La résolution sur le VAB est
de 50 cm. Le ton voilé et sombre en bas du cliché est causé par l'ombre des
nuages

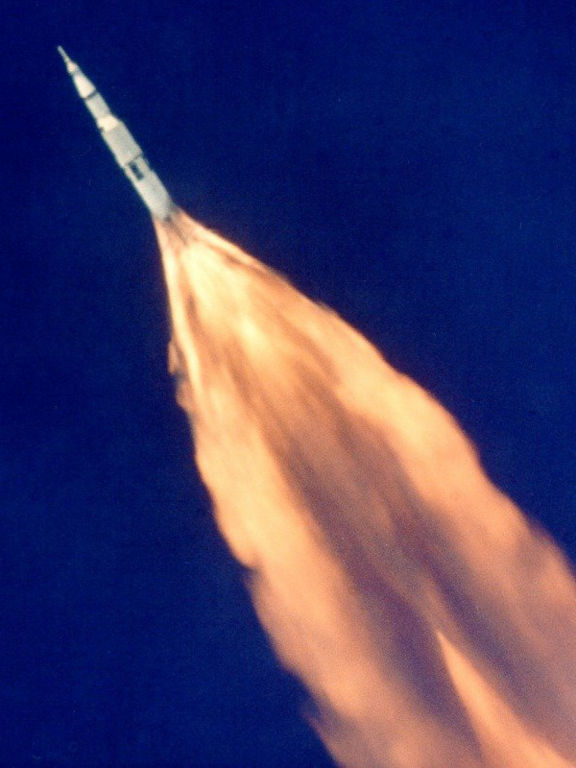
Image du lancement d'Apollo 11
en juillet 1969 vue par l'avion ALOST. Les flammes des moteurs F1 remontent
le long de l'étage S1C. Ce phénomène s'explique par le fait que les moteurs
F1 ont été conçues pour fonctionner au niveau de la mer et arraché les 2500
tonnes du lanceur le plus rapidement possible; Les gaz s'éjectent donc à la
même pression qu'au sol. Avec l'altitude, la pression de l'air chutant, le
jet augmente en taille. Dans le cas du F1, les gaz d'échappement de la
turbine sont injectés dans les parois de la tuyère du moteur. Ce gaz qui a
moins de vitesse et est très noir augmente de volume avec l'altitude. Il est
capable de remonter le long des moteurs et envelopper une partie du premier
étage de suie.

La caméra ALOTS équipée d'un
télescope de 70 mm filme l'ascension d'Apollo 11 au moment de la séparation
du Sic et du S2 à 70 km d'altitude. Les moteurs F1 terminent leur
combustion. Les deux points blanc à la base sont les retro-fusées de
séparation. L'étage est recouvert de suie presque entièrement. Les 5 points
blanc à la base du S2 sont les moteurs J2 en fonctionnement.
|