|
UNE CIBLE POUR GEMINI, L'AGENA
|
Vue par les astronautes amarré à l'étage Agena, la terre En 1961, alors que la NASA recherche les nouvelles spécifications de son Mercury Mark 2 pour les rendez vous en orbite, les techniciens pense au SAINT ou a l'Agena. L'Agena est préféré et sélectionné en 1962 et le programme SAINT annulé. Depuis 1960, l'étage Agena est utilisé par l'USAF pour toutes sortes d'opérations spatiales, depuis les satellites MIDAS jusqu'au sondes lunaires de la NASA Ranger et martienne Mariner associé au lanceur Atlas, Thor et Titan. De plus, c'est le seul second étage américain stabilisé équipé d'une centrale inertielle et de moteurs de manoeuvre. L'Agena fut à un moment pensé pour propulser les premières cabines habitées, mais son faible diamètre de 1,5 m interdisait leur adaptation. 365 étages Agena seront lancés jusqu'en 1987 dont 269 Agena D.Lockheed Missile construit l'Agena. La
NASA passe commande pour 12 étages qui seront modifiés en cible pour
Gemini, le Gemini Agena Target Vehicle.
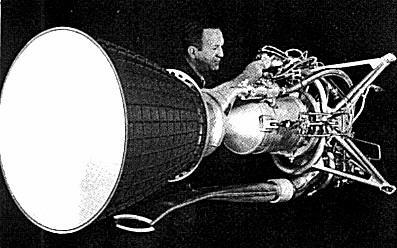
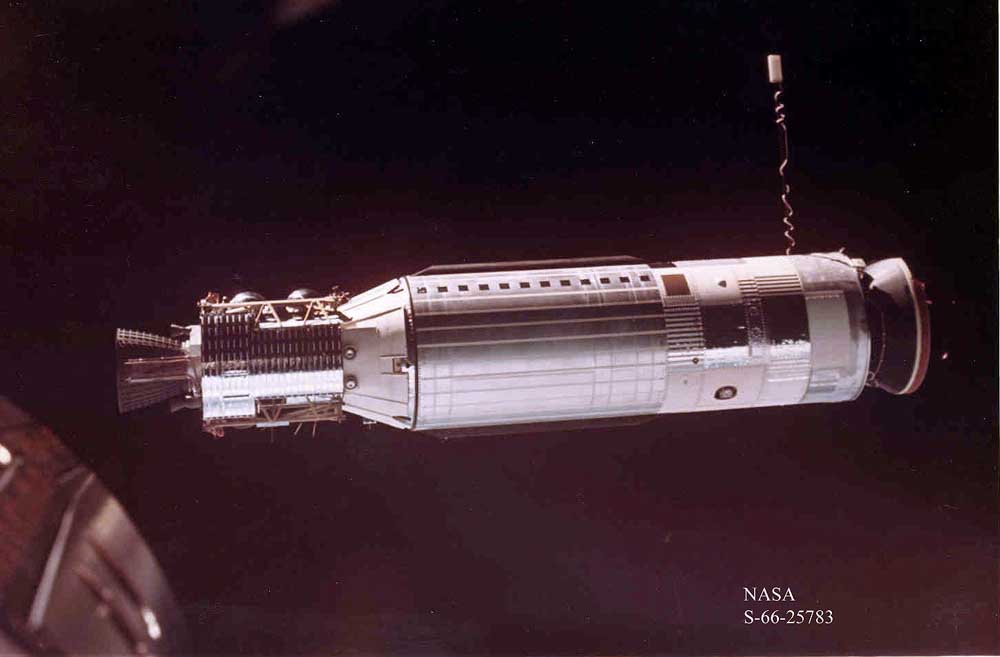
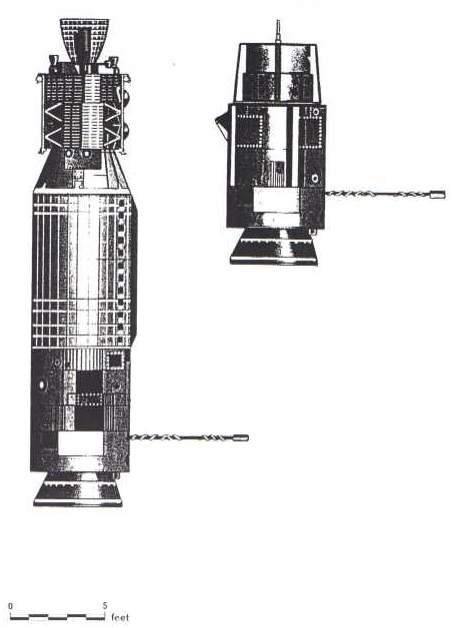
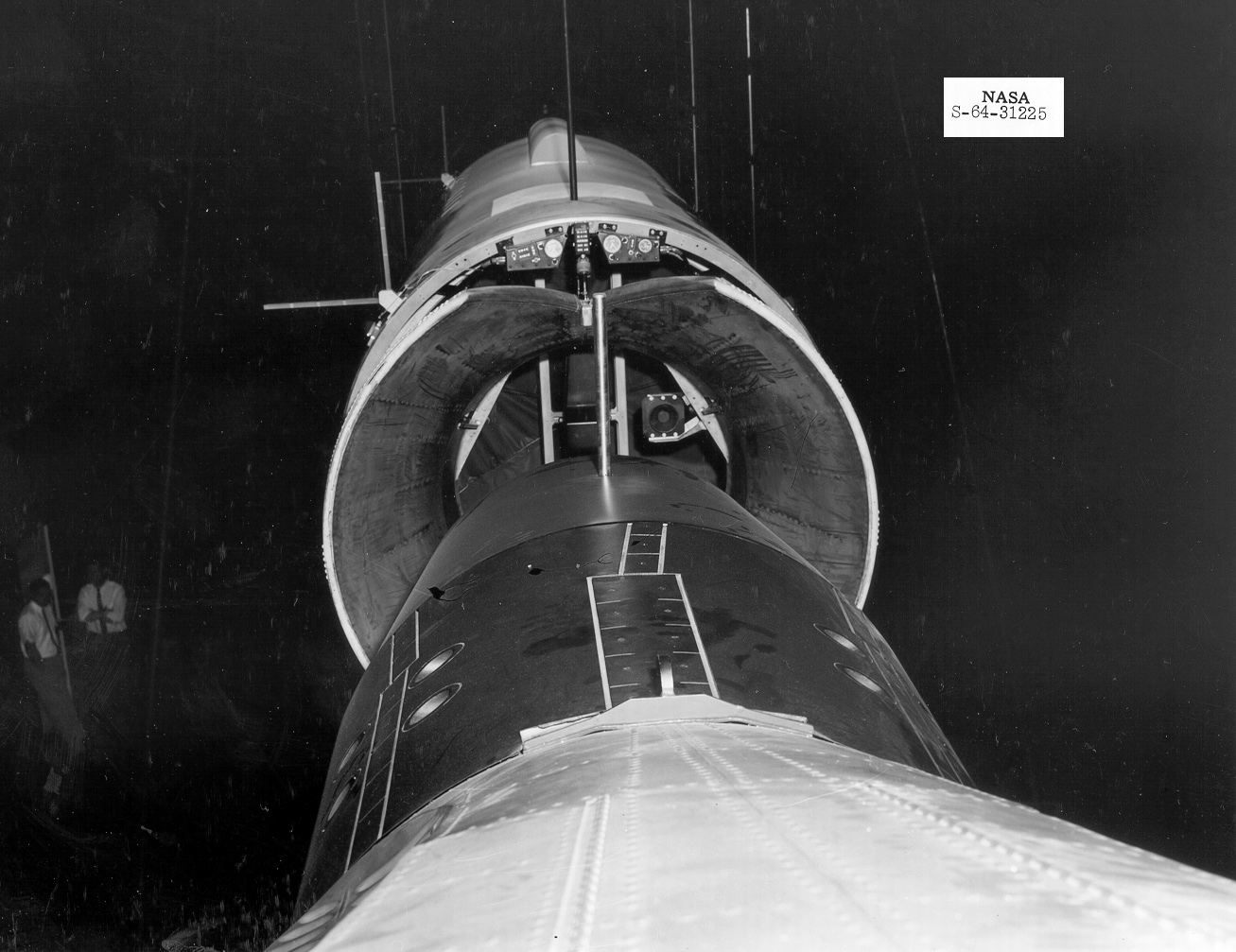
L'étage est équipé d'électronique de bord avec un répondeur à effet Doppler pour mesurer la distance avec la cabine. L'avant est occupé par le système de jonction TDA Target Docking Adapter, une pièce femelle en forme de tronc de cône permettant la réception du nez de la cabine. Une coiffe protége le tout, l'ensemble mesurant alors 11 m de long.
Gemini Agena Target Vehicle Le lanceur Atlas SLV 3 mesure lui 20 m de haut pour 4,8 m de diamètre au niveau du bloc de propulsion, 3 m pour les réservoirs. Pesant 104 tonnes au décollage, il développe 156 tonnes de poussée au lancement (RP 1 et LOX).
Lancement d'une Atlas avec la cible Agena et ADTA 7 étage Agena sont construits modifiés et assemblés pour le programme Gemini de septembre 1964 à juillet 1966. En avril 1964, l'USAF demande un vol d'essai pour valider l'étage dans sa nouvelle mission, mais la NASA refuse car ce vol utiliserait un lanceur Atlas que la NASA n'avait pas. A la place, l'étage GATV 5001 est retiré de la chaîne pour servir lors d'essais au sol. Il arrive au Cap en mai 1965, assemblé sur un Atlas et tester sur le LC 14. L'étage est ramené chez Lockheed pour être restauré le 23 novembre. Reconstruit entièrement et renommé 5001R, il est livré au Cap en septembre 1966 et lancé le 11 novembre pour GT12 au sommet d'un Atlas TLV 5307. Le premier Agena lancé pour Gemini est le 5002, livré en juillet 1965 au Cap et lancé le 25 octobre 1965 par un Atlas TLV5301. Malheureusement, le contact avec l'Agena est perdu en vol. GT6 réalisera avec rendez vous avec GT7. L'Agena 5003 arrive au Cap en janvier 1966 pour être lancé avec succès le 16 mars sur un Atlas LTV 5302 pour GT8.
L'Agena 5004 est lancé le 17 mai 1966 pour l'opération GT9, mais un problème de lanceur (Atlas TLV 5303) fait échoué le tir. Une cible de remplacement dite ADTA est lancé à la place avec un Atlas TLV 5304, un lanceur assigné à l'origine au lancement de la sonde Lunar Orbiter. L'avant dernier Agena, le 5005 sert pour GT10 le 18 juillet 1966 au sommet d'un Atlas TLV 5305 et le dernier, 5006 le 12 septembre pour GT11 au sommet d'un Atlas TLV 5306.
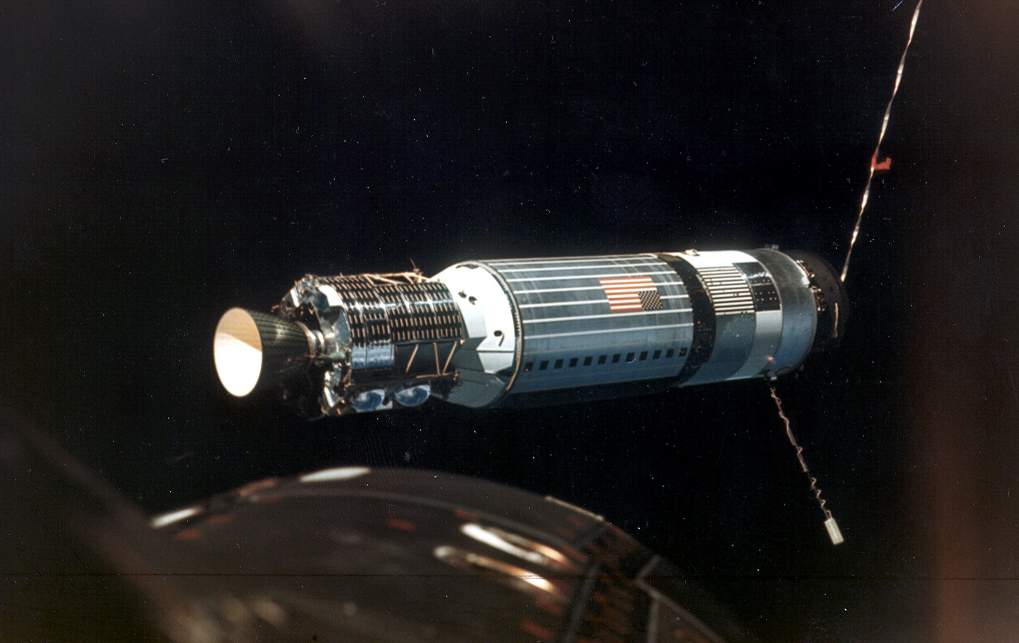
Les cibles Agena et ADTA La cabine Gemini comporte quelques petites modifications pour réaliser ses amarrages tel qu'un collier permettant une liaison mécanique avec l'Agena, un radar transpondeur, des lumières en plus pour visualiser la cible et des panneaux de contrôles supplémentaires. Le réseau de station de poursuite a été augmenté pour cette mission.
LA TECHNIQUE DU RENDEZ
ORBITAL 1965, les vols spatiaux en sont encore à leurs balbutiements et l'idée d'un rendez-vous orbital du domaine du rêve. Certes, en août 1962, puis en juin 1963, les Soviétiques ont accompli deux vols couplés avec Vostok 3 et 4, Vostok 5 et 6, mais c'était à plusieurs kilomètres de distance et en utilisant une technique purement balistique, les capsules Vostok ne disposant d'aucune capacité de manoeuvre orbitale. Or, le programme lunaire Apollo repose sur une technique totalement inédite, baptisée "rendez-vous en orbite lunaire" : un module de commande, avec tous les systèmes nécessaires au retour sur terre, reste en orbite autour de la Lune tandis qu'un module va se poser à sa surface. Après exploration, les astronautes regagnent alors l'orbite lunaire pour s'amarrer au module de commande. La théorie affirme que la technique doit fonctionner mais son application pratique reste encore à prouver et c'est là l'objectif du programme Gemini. Les analystes savent que la réussite d'un rendez-vous orbital repose sur plusieurs facteurs. Tout d'abord, le vaisseau "chasseur" doit être placé quasiment dans le même plan orbital que la cible. Ensuite, il doit être en mesure de dépasser la cible suivant un timing permettant d'entreprendre les manoeuvres d'approche finale à la lumière du jour orbital. En effet, l'équipage doit utiliser des capteurs optiques embarqués pour réaliser l'acquisition de la cible, la poursuite au sol étant trop imprécise pour les opérations de proximité. Enfin, le "chasseur" doit pouvoir approcher la cible à une vitesse relative suffisamment lente pour permettre un contact sans risque. En orbite, l'altitude et la vitesse
sont interdépendantes. Plus l'orbite est haute, moins la vitesse
du vaisseau est élevée. Lorsqu'une impulsion est produite dans
la direction de son orbite, un vaisseau gagne de l'altitude et
voit sa vitesse se réduire, contrairement à ce que l'on pourrait
penser. La forme de l'orbite - circulaire ou
excentrique - est, quant à elle, déterminée par le point de
l'orbite - apogée ou périgée - où cette impulsion est donnée. Lancer une fusée vers l'Est permet
de profiter au mieux de l'effet de fronde dû à la rotation de la
terre et, puisque le centre géométrique de toute orbite est nécessairement
le centre de la Terre elle-même, l'orbite résultante possède
une inclinaison par rapport à l'équateur égale à la latitude
du site de lancement. Par exemple, un lancement vers l'Est à
partir de Cape Canaveral en Floride résultera dans une orbite
inclinée d'un peu plus de 28° par rapport au plan équatorial.
La rotation de la Terre amène le site de lancement à croiser
l'arc le plus septentrional de l'orbite une seule fois par jour.
Les cibles de Gemini sont placées sur des orbites dont les
inclinaisons étaient légèrement supérieure à la latitude du
site de lancement, de sorte que le site de lancement soit
suffisamment proche du plan orbital de la cible pendant
pratiquement deux heures. Fenêtre planaire et fenêtre de
phase doivent toutes deux être ouvertes pour réussir un
rendez-vous - l'une sans l'autre ne sert à rien. Mais si les deux
fenêtres sont brèves, les chances de les voir coïncider au
cours d'une seule orbite de la cible sont plutôt faibles. Une
technique appelée "yaw steering" permet quelque
latitude dans l'ouverture de la fenêtre planaire. Si, au moment
du décollage, le plan orbital de la cible se trouve à quelques
kilomètres à droite ou à gauche de la trajectoire
ascensionnelle du "chasseur", le "chasseur"
peut dévier légèrement sur la droite ou sur la gauche au cours
des huit-neuf minutes de l'ascension et glisser ainsi sur le plan
orbital voulu même si la géométrie initiale n'est pas parfaite. L'astronaute Edwin "Buzz"
Aldrin, qui tint un rôle-clé dans le développement des procédures
de rendez-vous (et auteur du thèse de doctorat sur le sujet),
explique que "les instincts qu'un astronautes pouvait avoir
et qui lui avaient permis de rester en vie en tant que pilote de
chasse, pouvaient facilement le trahir dans l'espace. "
Ainsi, les astronautes qui tentèrent le premier rendez-vous, au
cours de la mission Gemini 4, essayèrent de piloter leur
vaisseau à la façon d'un avion intercepteur, approchant leur
cible par au-dessus et par derrière. Toutes les mises à feu des
propulseurs qu'ils tentèrent ne parvinrent qu'à placer leur
vaisseau sur une orbite toujours plus haute et toujours plus lente
et à laisser filer leur cible irrésistiblement. Cette nouvelle stratégie avait
plusieurs avantages. Au cours de l'approche finale, le pilote
n'aurait qu'à contrôler manuellement la dérive latérale et à
freiner pour atteindre les vitesses prescrites aux distances
prescrites ; la mécanique orbitale s'occuperait du reste. Plus
que tout encore, cette stratégie était particulièrement
efficace dans les situations critiques : panne de radar, système
de contrôle en mode dégradé. Toutes les missions emporteront
des piles de graphiques et d'instructions pour les procédures
manuelles afin de pallier la perte éventuelle de capteurs ou
d'ordinateurs. L'instant précis de l'ultime mise à feu
d'approche finale pouvait être donnée par l'ordinateur de bord où
déterminée par l'équipage en mesurant l'angle d'élévation de
la cible située au devant et au-dessus. Même dans le cas d'une
panne totale d'ordinateur et de perte de liaison radio avec le
contrôle de mission, les astronautes pourraient utiliser les
graphiques pour déterminer où et quand cette importante mise à
feu devrait se produire - et ils c'est ce qu'ils firent.
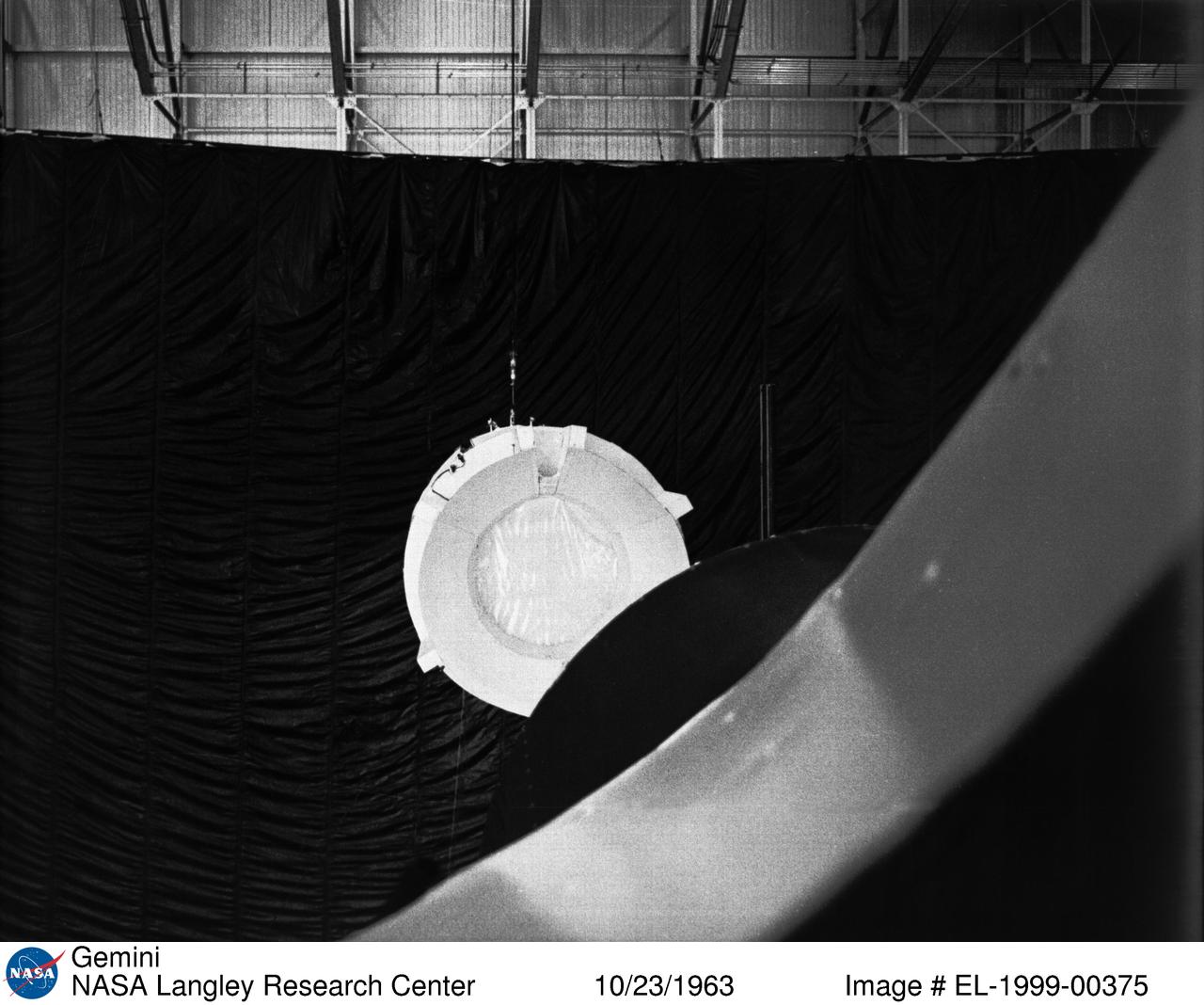
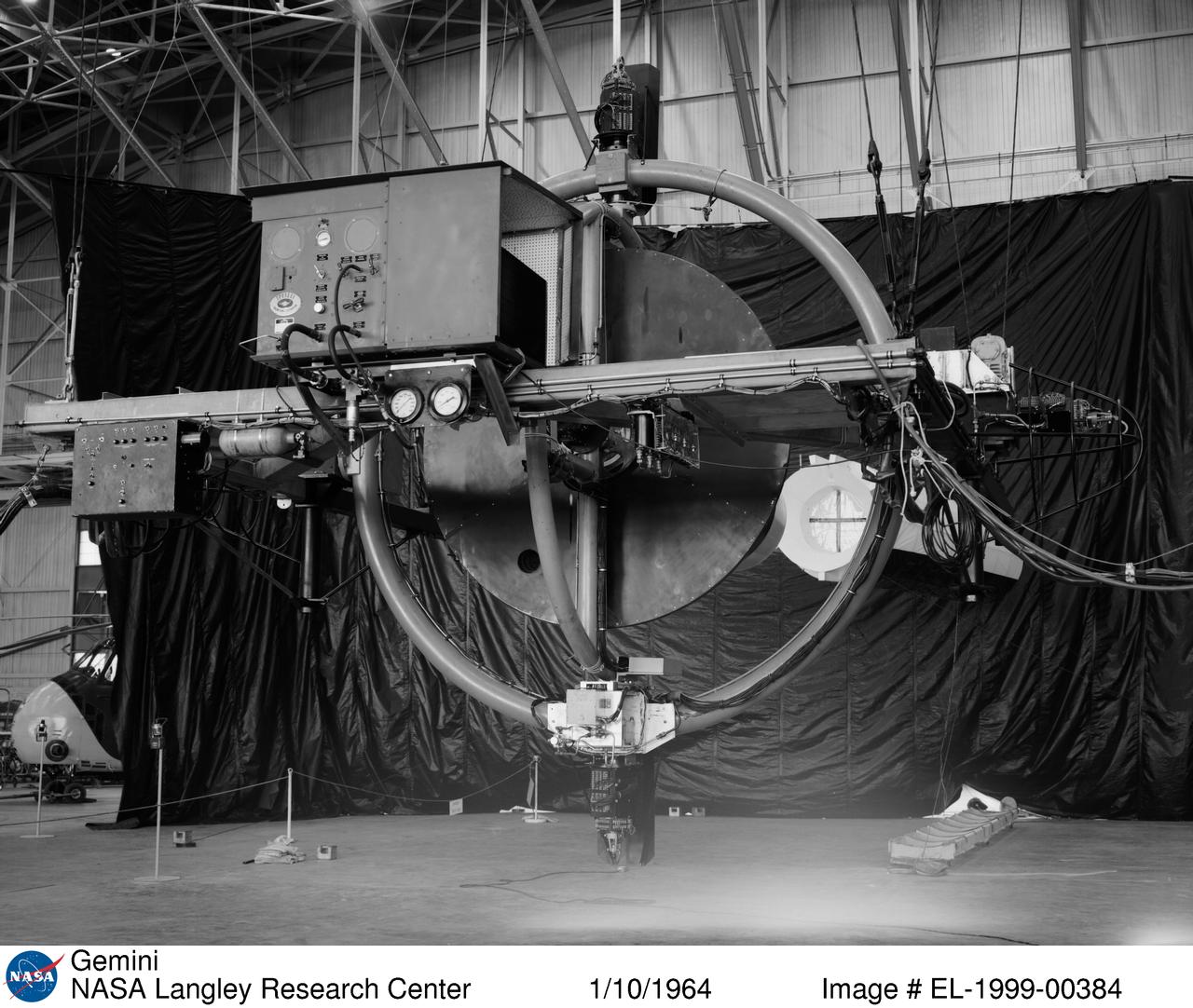
LE RENDEZ VOUS DOCKING SIMULATOR Afin de simuler les opérations de rendez vous et entrainer les équipages aux manoeuvres d'approche, le centre de Langley (Virginie) a construit le RDS ou real Time Dynamic Simulator dès 1963. Installé dans le bâtiment 1244 dans une zone à l'Est du centre, il permet de par sa taille 64 m de long, 4,5 m de large et 12 m de haut de simuler n'importe quel rendez vous dans l'espace avec tous les vaisseaux spatiaux. Il servira pour Gemini-Agena et Apollo CSM-LM Le simulateur est constitué d'une grue dessous laquelle est suspendu un système à cardan motorisé selon les trois axes. Ce cardan accueille la maquette de Gemini qui se pilote par les astronautes pour venir rejoindre une maquette de l'Agena.
Après Apollo, le bâtiment recevra une maquette d'avion de tourisme et sera employé pour simuler les problèmes d'approche
|