|
|
|
2018
Janvier, le déchargement du cargo CRS 13 se poursuit avec les équipements TSUS 1 et SDS qui seront placées à l'extérieur sur la palette ELC et sur Columbus. SDS remplace RapidSAt amené par CRS 4 en 2014. Il sera placé dans la soute du CRS 13 et détruit au retour dans l'atmosphère. CRS 13 doit quitte la station le 13. Dans le cadre du programme Commercial Crew Program de la NASA visant à envoyer des équipages vers ISS, la NASA a demandé à Space X et Boeing de développer leur propre vaisseaux spatial. Boeing développe le CST 100 et Space X le dragon 2. Ce dernier doit débuter ses vols cette année avec un vol automatique en août (Demonstration Mission 1) et habité en décembre (DM 2). Boeing fera de même avec un vol automatique en août (Orbital Flight Tets 1) et habité en novembre (OFT 2).
19 janvier, l'astronaute Serena Aunon-Chancellor remplacera Jeanette Epps pour le vol du Soyouz MS 9 en juin. Epss, sélectionné à l'expédition 56-57 en janvier 2017 devait être la première noire Africaine à séjourner sur ISS pour 6 mois et la 7e à réaliser un vol spatial après Robert Curbeam, Alvin Drew, Joan Higginbotham, Leland Melvin, Robert Satcher et Stephanie Wilson. C'est l'astronaute Anne Mc Clain qui remplacera Aunion Chancelor sur le Soyouz MS11 en novembre.
Epss, 47 ans a été sélectionné par la NASA en 2009, class 20. Bac de physique, maîtrise en sciences, doctorat en génie aérospatial, elle a rejoint Ford Motor Cie puis la CIA en 2002. 20 janvier, ISS vient de passer son 7000e jour en orbite.
23 janvier, sortie dans l'espace de Mark Vande Hei et Scott
Tingle durant 7 h 24 mn pour mettre en place une nouvelle main LEE au bras de la
station.
25 janvier, le bras de la station a quelques soucis avec sa nouvelle main. Mark Vande Hei et Norishige Kanai sortiront le 2 février pour remettre en place l'ancienne main.
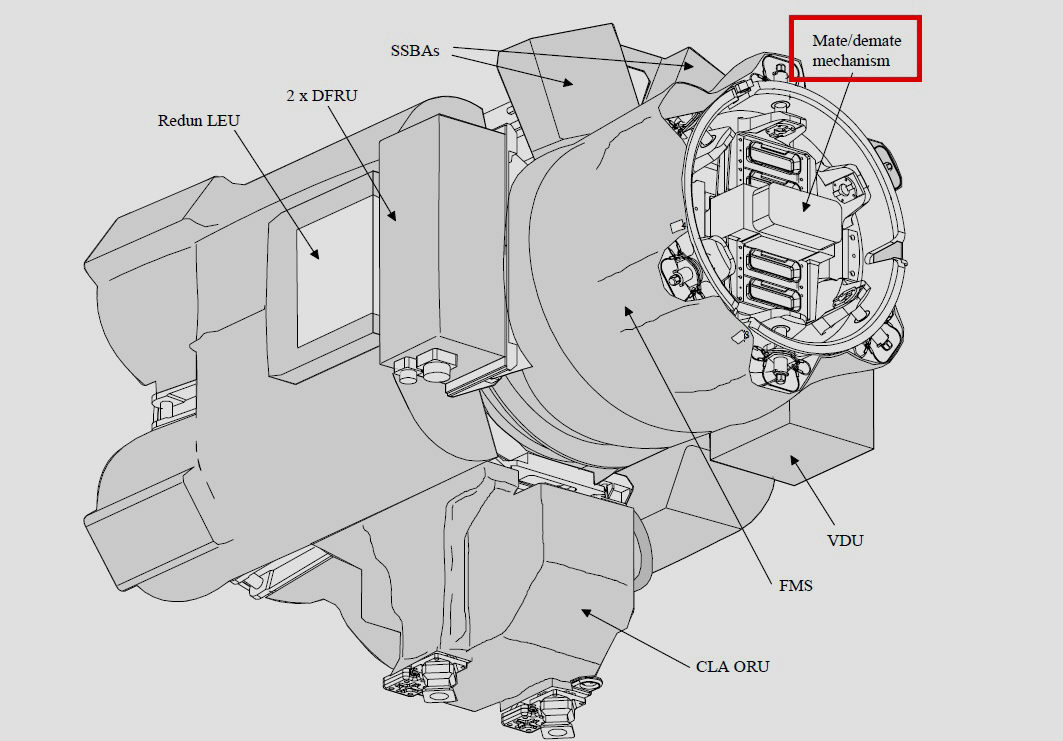
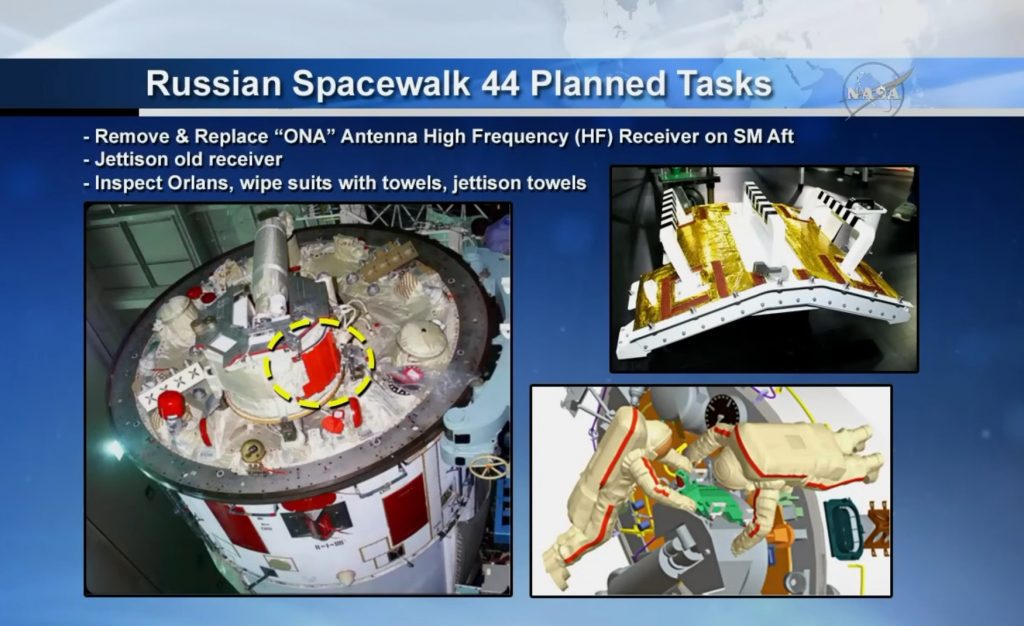
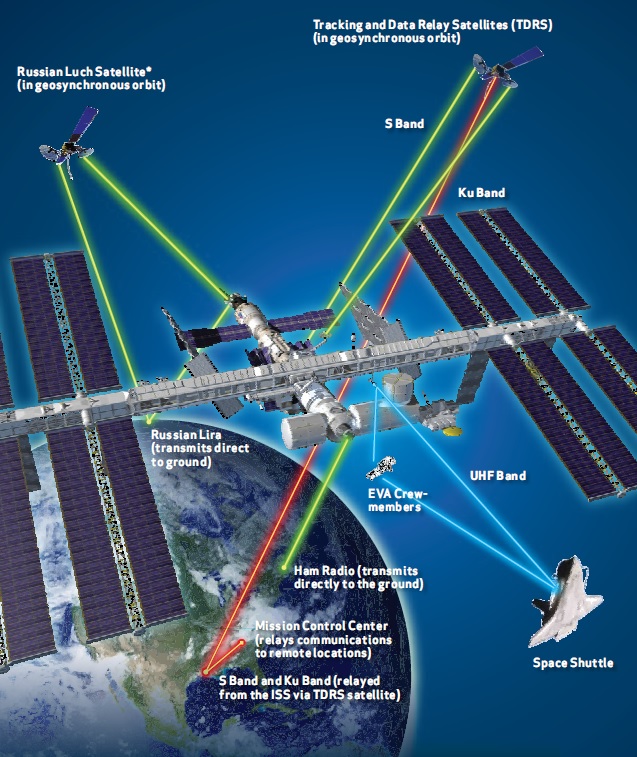
La main LEE du bras de la station. Pour le moment, le bras a le LEE 203 comme main A. Sur la main B, il y a le lEE 204, livré en 2009 par le Shuttle. Leur durée de vie espéré est de 10 ans. L'ancien LEE 201 est stocké sur l'ESP 2 et le LEE 202 sur le POA, l'unité de remplacement. la NASA envisage de remettre le LEE 202 a la place du 204. 28 janvier, la NASA repousse à mi février la sortie prévu le 2. Un correctif informatique a corriger le problème de la nouvelle main LEE du bras robot. Le 2, les Russes Aleksandr Misurkin et Anton Shkaplerov sortiront vers le segment Russe pour installer une antenne grand gain sur le module de service. 2 février, 44e EVA pour les cosmonautes russes. Aleksandr Misurkin et Anton Shkaplerov sortent durant 8 h 13 mn pour remplacer une antenne grand gain sur le module de service Zvezda compatible avec le réseaux de satellite relais russes Luch positionné en orbite GEO. C'est une des plus longue EVA russe et la 5e en terme de longueur depuis 1965. Ses travaux visent à mettre à niveau le segment russe d'ISS en prévision de l'arrivée du module MLM Nauka et le départ du PIRS.
Février, la NASA décide de descendre le "robonaut" lors du prochain retour d'une cabine Dragon. Lancé en février 2011, Robonaut 2, développé par le centre Johnson était le premier robot humanoïde envoyé dans l'espace. Dans la station, il devait travailler au coté des astronautes, les délestant des taches répétitive et terne pour qu'ils se consacrent aux expérimentations scientifiques. Déballé de son emballage en mousse, Robonaut 2 est mis sous tension en aout. Télécommandé depuis le sol, durant l'année 2012, il s'entraine alors sur des panneaux à manipuler des interrupteurs et à nettoyer des rampes d'accroche. Une fois par mois, le robot est installé et mis en route pour effectuer des tâches de recherches.
En 2014, la NASA décide d'améliorer le robot et le dotant de jambes, puisqu'il n'est composé que d'un torse, une tête et 2 bras. Ces jambes, allongées et ondulées devaient lui permettent plus mobilité agissant comme des bras secondaires. Malheureusement, la mise à jour du Robonaut ne se passe pas comme prévue et le robot est mis en sommeil. Sa dernière tache remonte à décembre 2013. Dans le projet de la NASA, Robonaut devait après cette phase 2 de mobilité IVA (dans la station) réaliser des EVA dans l'espace après une nouvelle mis à jour majeure. En fait, le robot conçue comme expérimental a été développé sur terre et sa mise à jour dans l'espace a été plus compliqué que prévu, tant au niveau mécanique que logicielle. La mise en place des jambes qui devait prendre 20 heures a pris en fait 40 heures, débutant le 16 juillet 2014 pour finir le 28 aout suivant. Les tests réalisés le lendemain ont montré des problèmes (plus de télémétries puis fils coupé). Le 17 décembre, lors d'une mise sous tension interne, les jambes ne répondaient plus.
Pendant les 6 premiers mois de 2015, le fonctionnement du
robot est erratique. En septembre, le coupable semble être trouvé au niveau de
l'alimentation, mais en vain. En 2016, Robonaut est entièrement démonté pour
être analysé. 2 cartes contrôleurs sont même renvoyés sur terre pour être testé
et renvoyé sur ISS. Au final, la panne est trouvée: Robonaut n'avait pas de
terre dans l'espace et le courant électrique l'alimentant l'a dégradé au fur et
à mesure du temps, certains circuits se trouvant sous alimentés et d'autres
suralimentés. Le courant électrique ne circulait pas comme il le devait dans le
corps du robot.
7 février, il y a 10 ans, le module Columbus rejoignait la station. 13 février, Progress MS 08 rejoint la station. Le décollage prévu le 11 a été ajourné suite à un arrêt de chronologie à T-20 secondes. Il apporte 2746 kg de charges utiles pour les astronautes, dont 1390 kg de vivres et équipements, 890 kg de carburant pour rehausser l'orbite, 420 kg d'eau.
16 février, les astronautes Norishige Kanai et Mark Van Hei sortent 5h 57 mn dans l'espace pour des travaux de maintenance sur la station. La tâche principale était de déplacer deux mains du bras robot d'ISS, Canadarm 2 le LEE (Latching End Effector). L'un a été placé dans un espace de stockage à long terme. L'autre a été ramené à bord de l'ISS pour un retour et de la maintenance sur Terre. C'est la 208e EVA depuis ISS. 27 février, retour sur terre du Soyouz MS 06 avec à bord le Russe Aleksander Misurkin et les astronautes Mark Van Dei et Joe Acaba après un séjour de 168 jours dans l'espace.
12 mars, une EVA imprévue est programmée pour le
29 mars avec les astronautes Feustel et Arnold. La tâche principale sera
d'installer des équipements de communication sans fil (wireless )
supplémentaires à l'extérieur du nœud Tranquility, avant l'arrivée de l'ECOsystem
Spaceborne Thermal Radiometer (ECOSTRESS) du JPL qui arrivera avec CRS-15 début
juin. Soyouz MS 08 est lancé le 21 mars vers ISS. A bord l'équipage de l'expédition 56/57, le russe Oleg Artemyev et les astronautes NASA Andrew Feustel et Rick Arnold. Le vaisseau rejoint la station en 2 jours.
28 mars, Progress MS 07 quitte la station. Après un mois d'expériences scientifiques et appliquées, il rentrera dans l'atmosphère le 26 avril. 29 mars, Drew Feustel et Ricky Arnold sortent dans l'espace 6h et 10 mn
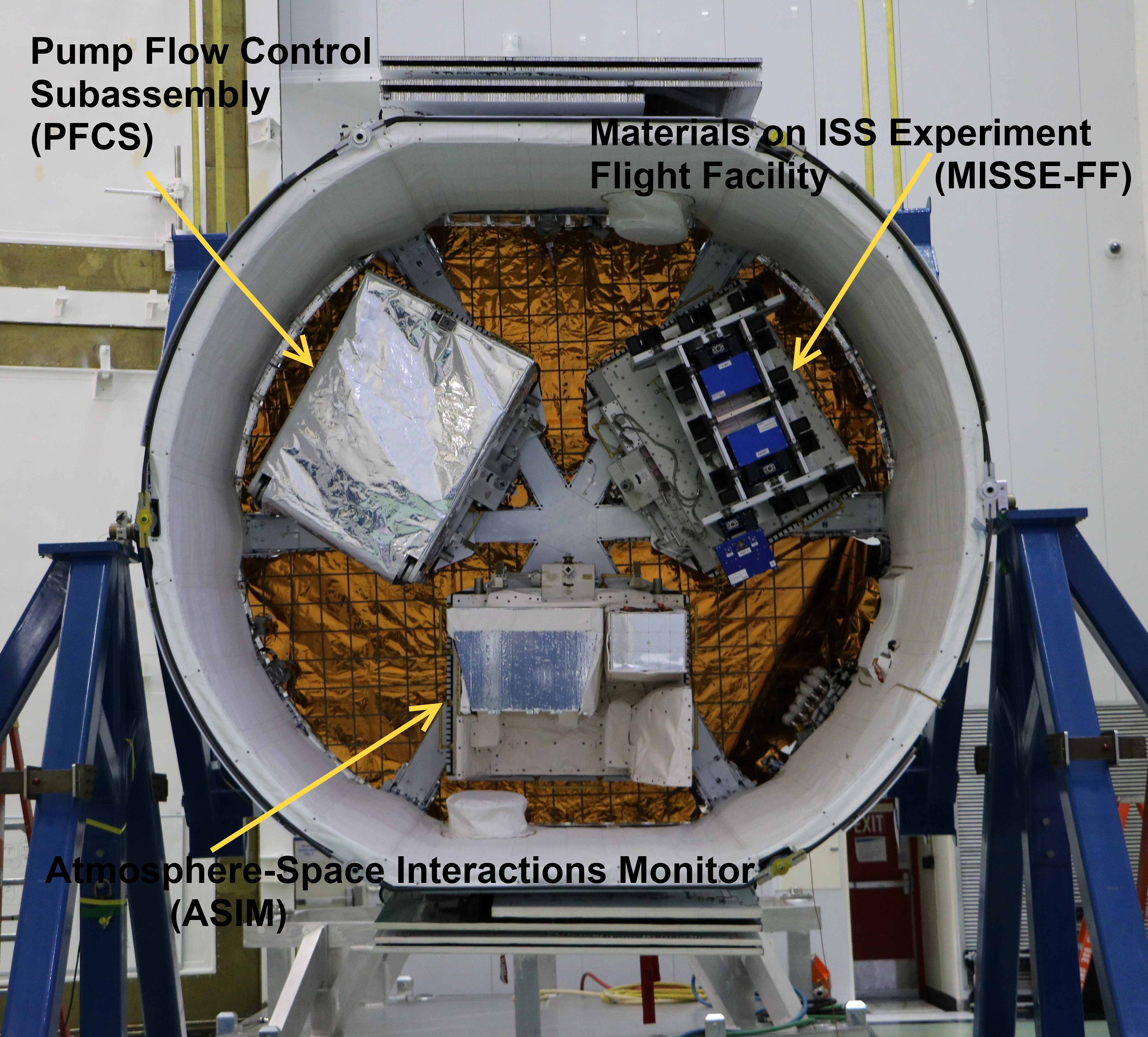
2 avril, Space X lance le cargo CRS 14. Il apporte 2760 kg de charge utile dans la partie pressurisée (nourriture, eau, air, vêtements, matériel et l'expérience RemoveDebris) et 926 kg dans le trunk non pressurisée.avec et 926 kg de charge externe, en l’occurrence l'expérience ESA ASIM (Atmosphere-Space Interactions Monitor), le module d'échange thermqiue servant au refroidissement de la station PFCS (qui servira de pièce de rechange) et MISSE-FF (bloc de 14 échantillons exposé au vide). A son retour, le cargo doit ramener sur terre Robonaut. Dragon 14 sera attrapé par le bras robot de la station et attaché au port nadir du module Harmony. RemoveDEBRIS, est une sorte de camion poubelle expérimental de l'espace. Conçu par la société britannique SSTL (Surrey Satellite Technology) il sera placé en extérieur de la station via le laboratoire japonais JEM, puis sera largué afin de tester et analyser différentes méthodes de capture comme un filet et un harpon. Son objectif est de tester des méthodes de capture afin de nettoyer à l'avenir l'orbite basse des nombreux petits débris spatiaux.
26 avril, désorbitation du Progress MS 07 (68P). 5 mai, retour en mer du CRS 14. 16 mai, sortie dans l'espace de Drew Feustel et Rick Arnold pour repositionner 2 pompes a ammoniac sur la poutre P6, échangeant une pompe en panne contre une autre en stockage dans l'espace depuis 20 ans.
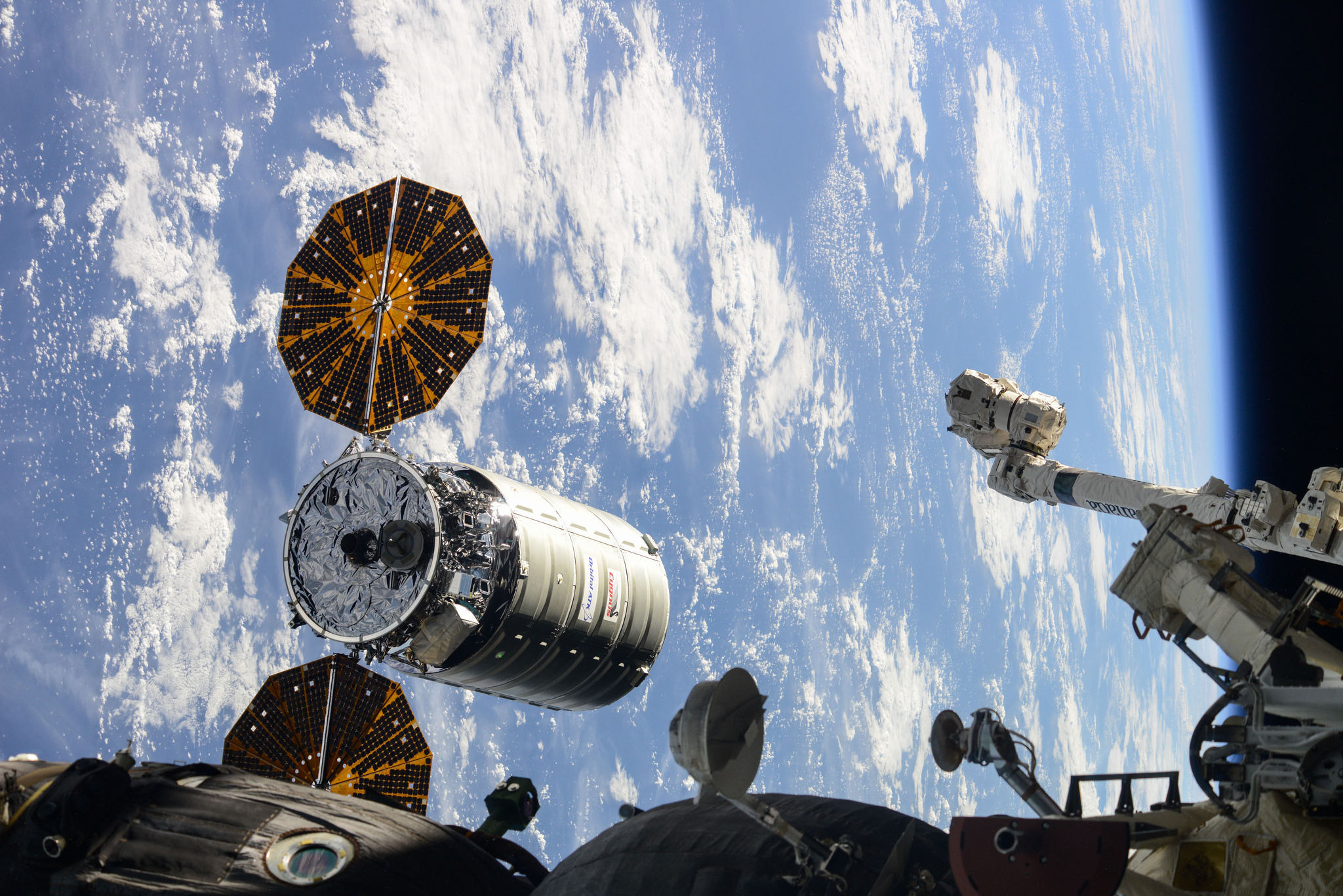
21 mai, lancement du cargo Cygnus OA 9 d'ATK vers ISS. Il apporte 3250 kg d'équipements pour les astronautes avec entres autres des CubeSats. Le vaisseau a été baptisé "JR Thompson", un ancien d'ATK décédé en 2017. Il est attaché à ISS le 24.
3 juin, retour au sol de la cabine du Soyouz MS 07 avec à bord Anton Shkaplerov, Scott Tingle et Norishige Kanai après 168 jours en orbite. 6 juin, lancement de Soyouz MS 09 avec à bord le russe Sergey Prokopyev, l'astronaute Allemand de l'ESA Alexander Gerst et l'Américain Serena Aunon-Chancellor composant l'expédition 56-57. Ils rejoignent l'équipage Drew Feustel, Ricky Arnold et Oleg Artemyev.
14 juin, les astronautes Ricky Arnold et Drew Feustel sortent dans l'espace pour des travaux de maintenance sur ISS. Les astronautes installent une paire de supports et de caméras haute définition sur le module Harmony qui aideront les futurs équipages commerciaux à s'aligner avec l'adaptateur d'amarrage international situé à l'extrémité avant du module.
20 juin, les astronautes éjectent depuis la
station le RemoveDEBRIS apporté par le cargo Dragon.
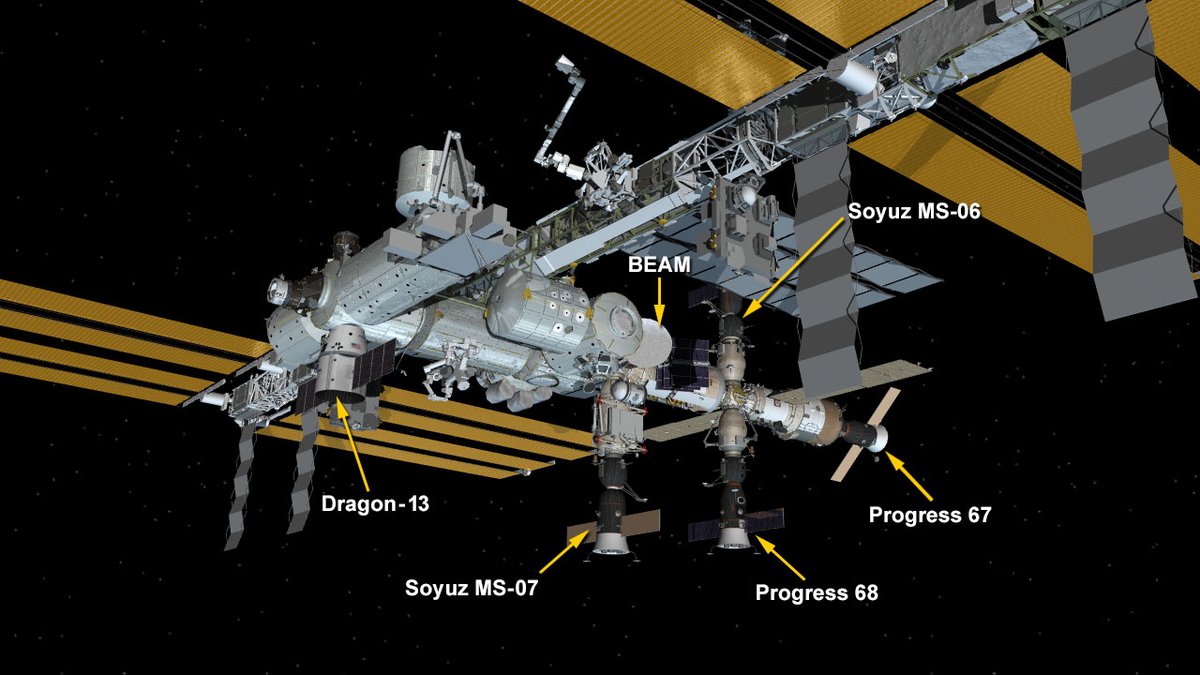
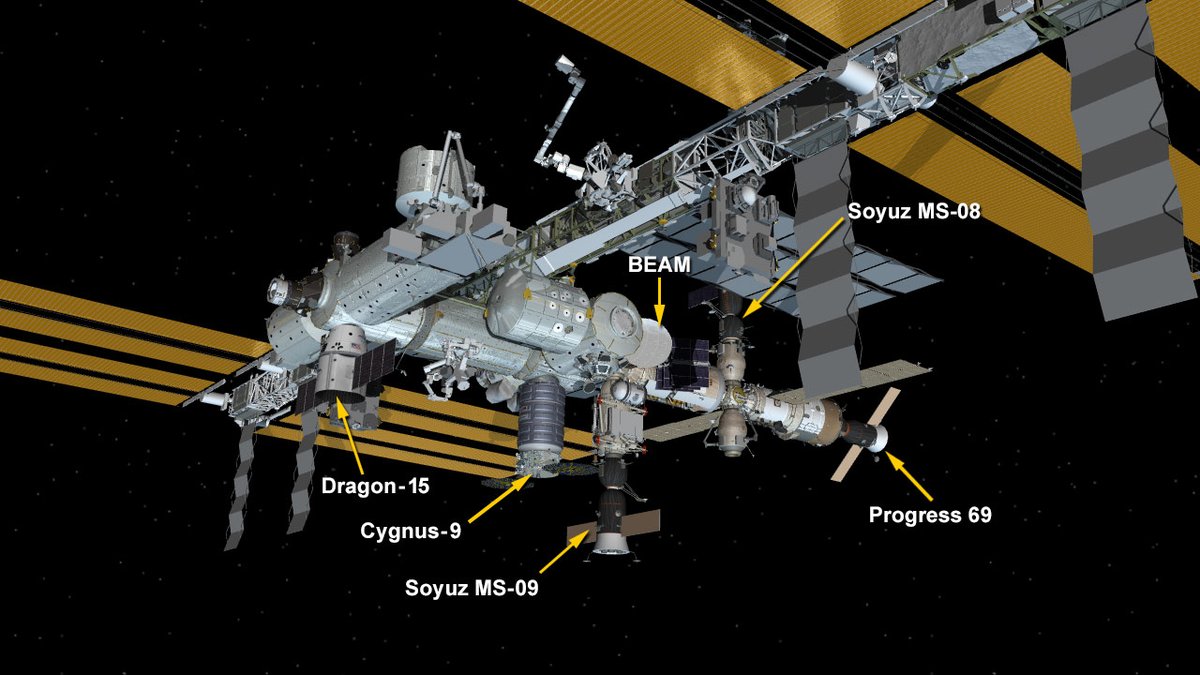
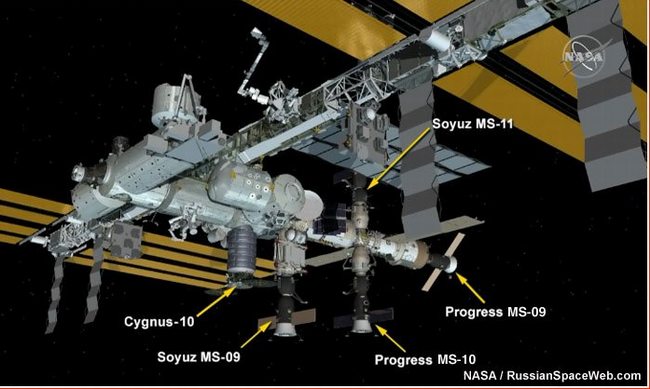
Capture du CRS 15 et configuration d'ISS après amarrage du cargo. 9 juillet, lancement du cargo Progress MS 09 vers ISS. Le vaisseau rejoint la station en 2 orbites et demi. il apporte 2567 kg d'équipements pour les astronautes, dont 1565 kg de matériels, 530 kg de carburant, 52 kg d'oxygène et air et 420 kg d'eau. 13 juillet, éjection de 3 CubeSats radioamateurs depuis ISS: EnduroSat AD, EQUIS Sat et MemSat
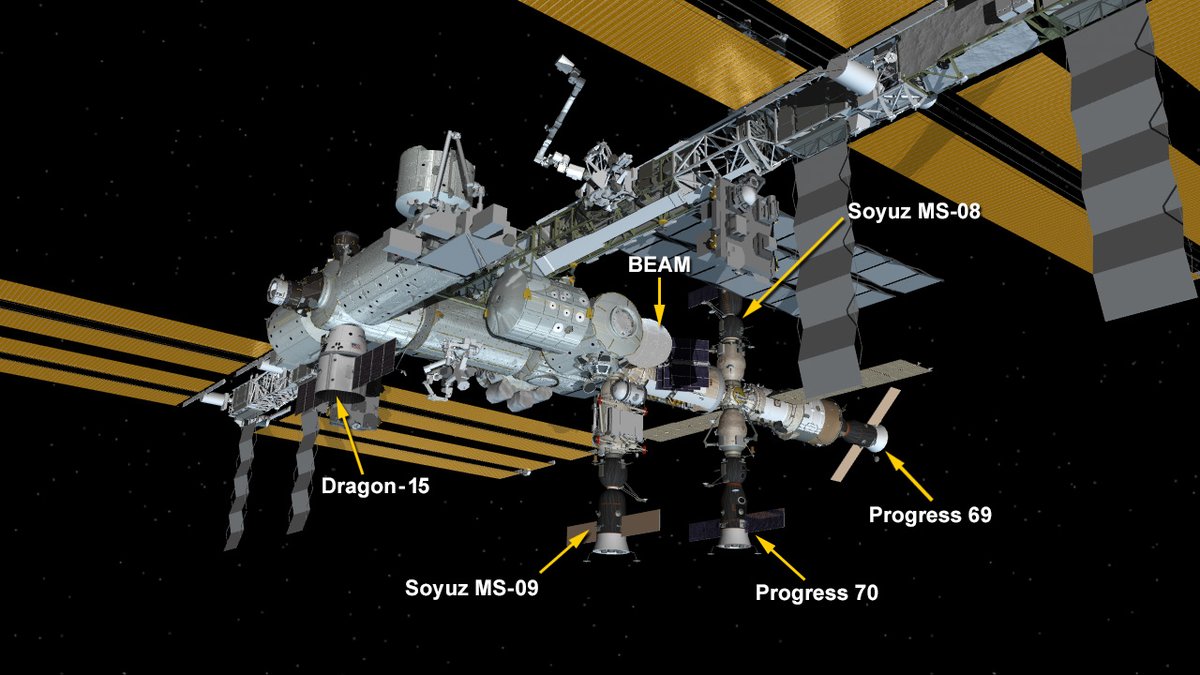
Configuration d'ISS après le départ du Cygnus OA 9 et l'arrivée du Progress MS 09 (70) 27 juillet, manoeuvre orbitale du Progress MS 08 en vue du retour du Soyouz MS 08 et du rendez vous avec Soyouz MS 09 15 aout, EVA des astronautes oleg Artemyev et Sergey Prokopyev. Ils déplient manuellement 4 petits satellites, installent des antennes et des câbles sur le module Zvezda.
3 août, Dragon CRS 15 quitte la station et amerrit dans le
pacifique. La NASA annonce la composition des
équipages des futurs vols vers ISS à bord des vaisseaux commerciaux de Boeing et
Space X. Eric Boe, Nicole Mann et Chris Fergusson sont assignés au premier vol
habité du CST 100 de Boeing (Josh Cassada et Sunita Williams au premier vol de
certification) tandis que les équipages
Bob Behnken
(2 missions sur navette) et de l’ancien pilote de la navette Doug Hurley (2 vols
de navette) assignés au premier vol habités du Dragon 2 (les
astronautes Mike Hopkins, un vol sur Soyouz et la nouvelle recrue Victor Glover
piloteront le premier vol de certification).
L'astronaute de l'ESA, Alexander Gerst 15 aout, les russes Sergey prokopyev et Oleg Artemyev sortent 7h 46 mn dans l'espace pour des travaux de maintenance sur ISS. ils installent l'expérience Icare sur le module Zvezda et déplient manuellement 4 nano satellites. La sortie se termine par le retour dans la station des plaques d'échantillons exposées au vide.
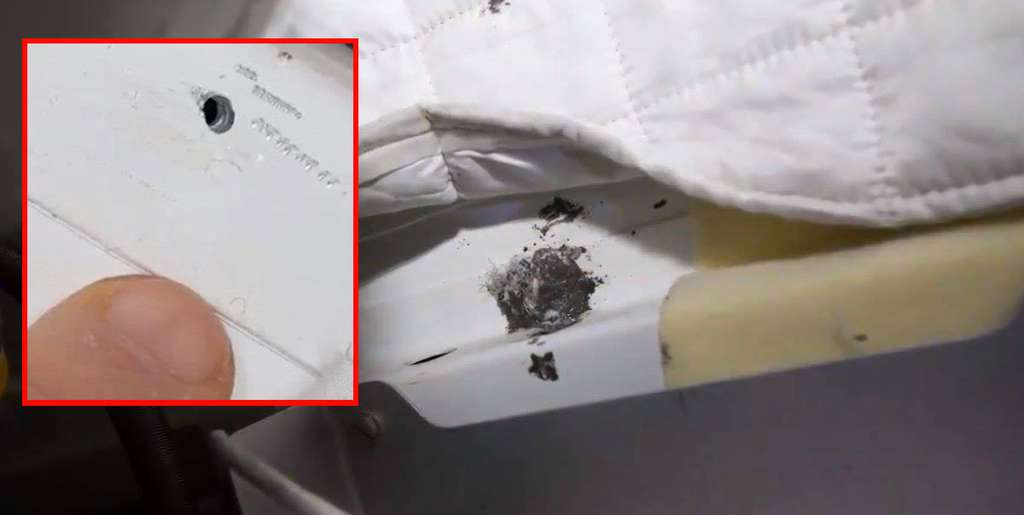
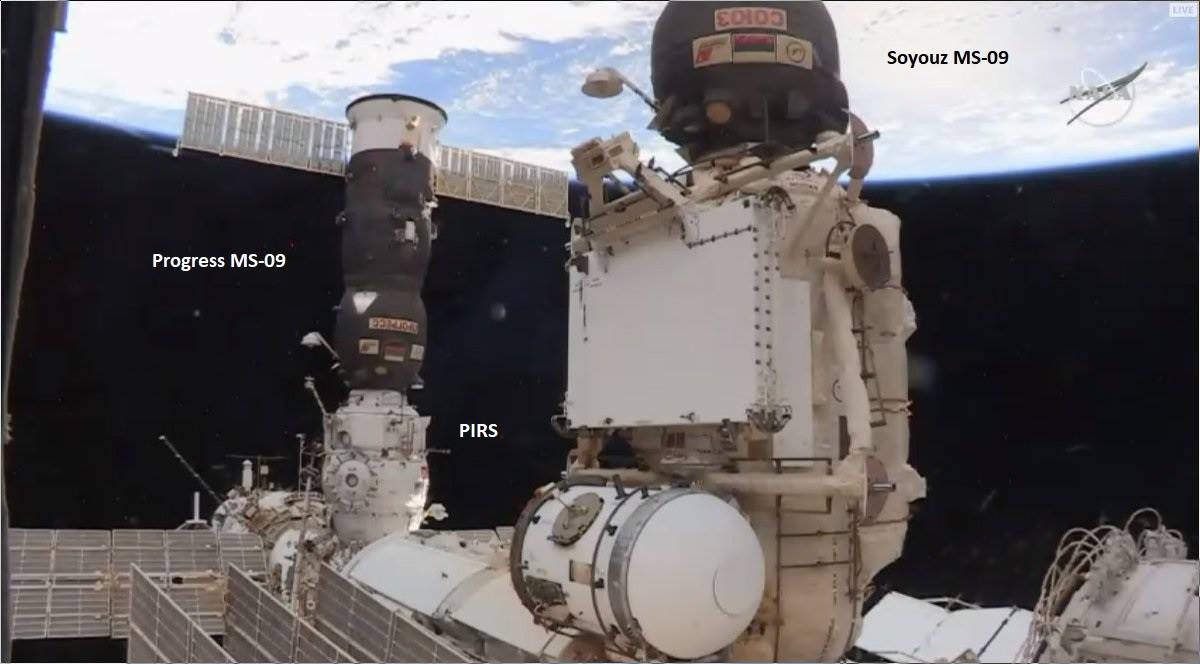
29 août, une fuite dans le module orbital du Soyouz MS 09 attaché au module Rassvet est détecté par les équipes de surveillance au sol alors que l'équipage dormait. la perte de pression dans la cabine est jugé sans gravité. Ce trou, d'un diamètre de seulement deux millimètres, pourrait avoir été causé par l'impact d'une micro-météorite. En attendant que la Nasa et Roscosmos déterminent une procédure de réparation, la fuite a été colmatée de façon provisoire à l'aide de bandes de matériaux polymères.
Septembre, 2 candidats astronautes proposés par les Emirats Arabes ont été sélectionnés par les Russes pour voler sur Soyouz en 2020, il s'agit de Hazza Al Mansouri, pilote militaire de 34 ans et le Sultan Al Neyadi, diplômé en électronique et ingénierie de communication, 37 ans. Ils ont été sélectionnés parmi 4022 candidats pour un vol de 10 jours sur ISS avec le MS 12.
20 septembre, MCC de Houston, la première dame des Etats Unis, Ivanka Trump parle aux astronautes d'ISS.
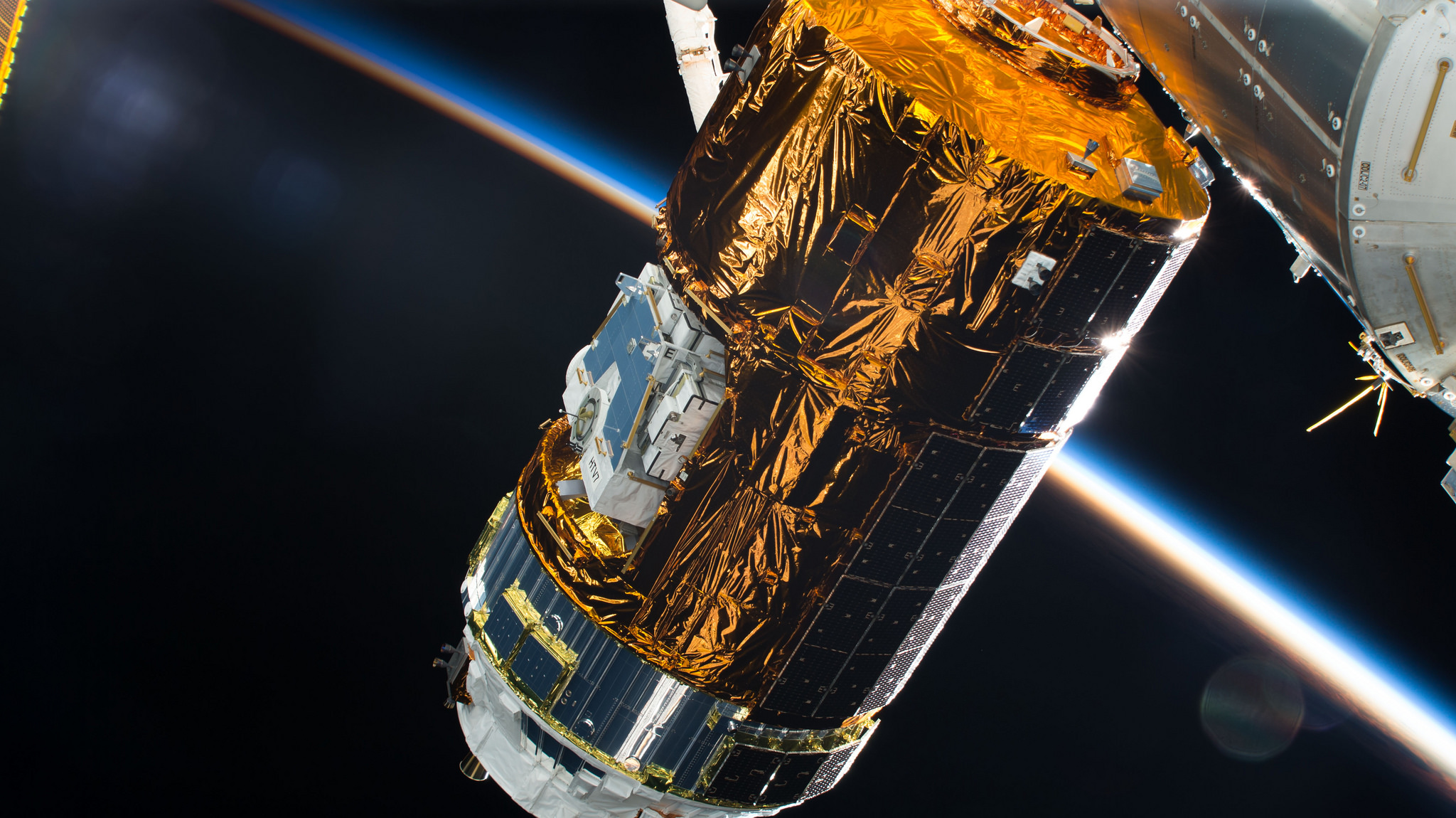
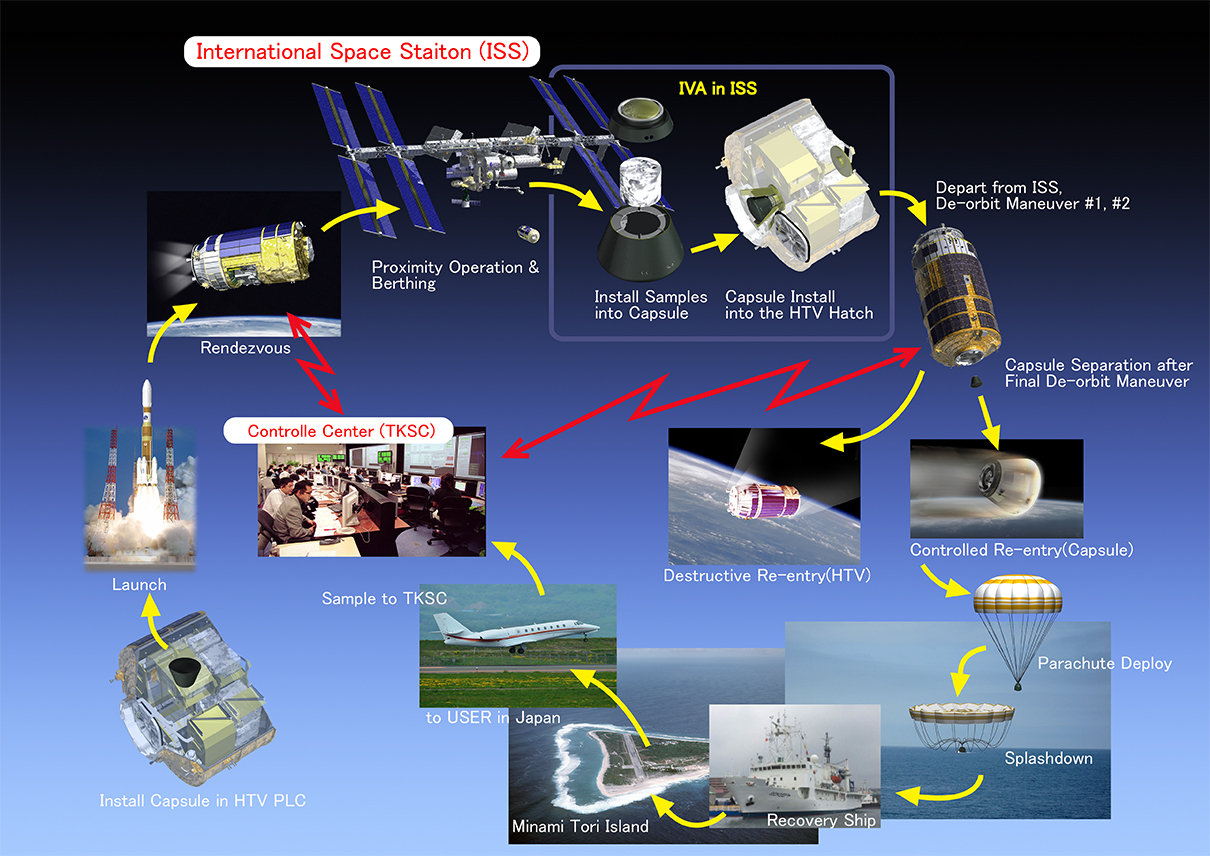
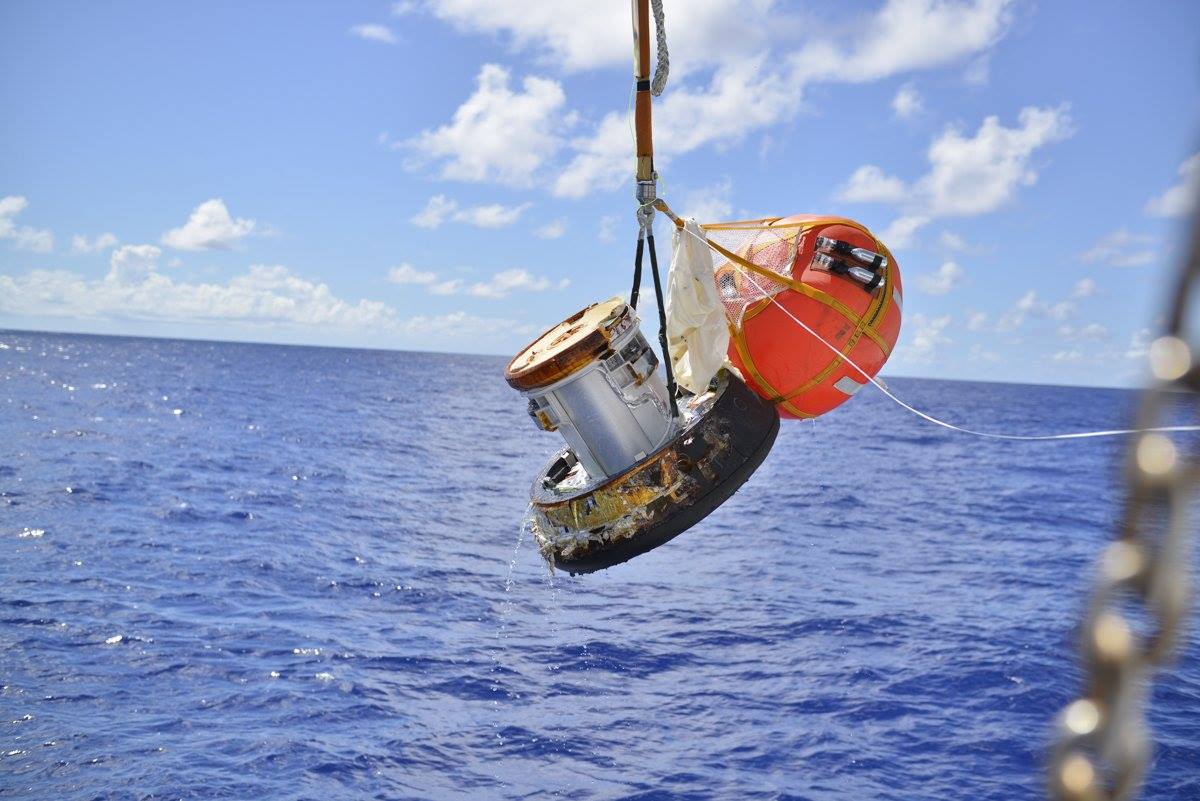
22 septembre, le Japon lance le cargo HTV 7 vers ISS. Il apporte 6200 kg d'équipements pour l'équipage, dont 2 racks de sciences américains, le rack Life Sciences Gloove, le rack Life Support Rack de l'ESA, la capsule de rentrée expérimentale HSRC, un démonstrateur radiateur et des satellites à déployés depuis l'espace 27 septembre, dévoilée le jour de son anniversaire de surcroît, la mission de Luca Parmitano en 2019 s'appellera Beyond. Un beau cadeau d'anniversaire pour l'astronaute italien de l'ESA, 2ème de la promotion ESA 2009 à faire un 2ème vol en ISS après son collègue allemand Alexander Gerst (actuellement dans l'ISS)
27 septembre, capture du cargo japonais HTV 7 par le bras robot SSRMS 2 pour être verrouillé au Node Harmony.
Octobre, la commission d'enquête sur la fuite d'air dans le Soyouz MS 9 révèle que c'est un acte délibéré et non le fait d'une micro météorite. Pas de défaut de fabrication, mais un trou percé directement sur la paroi du module depuis l'intérieur. Une seconde enquête devra confirmer qui et quand le trou a été percé. 4 octobre, retour de l'équipage de l'expédition 56 (Ricky Arnold, NASA, Oleg Artemyev Roscosmos et Drew Feustel NASA) à bord du Soyouz MS 8, après un vol de 197 jours dans l'espace.
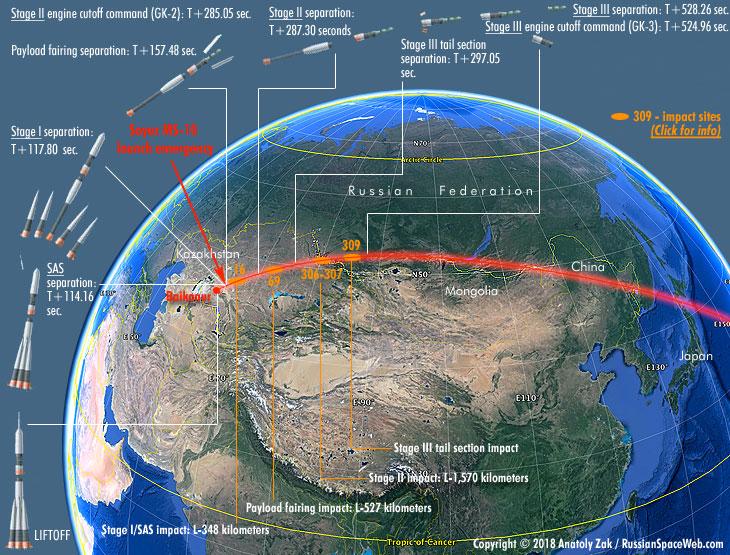
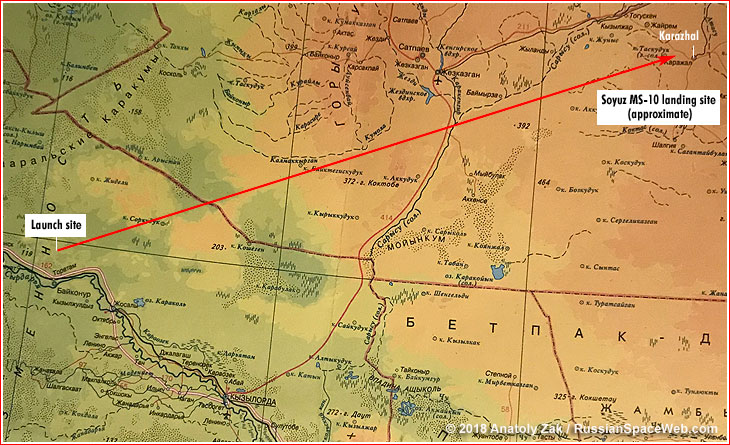
Le 11 octobre, le lancement du Soyouz MS 10 est un échec. Le lanceur décolle à l'heure prévu, 8h40 TU. Après la séparation des 4 boosters latéraux, le moteur du second étage s'arrête, le vol est avorté obligeant l'équipage à un retour balistique à 20 km de Dzhezkazgan, dans le Kazakhstan. La cabine atterrit sans problème ni dommage. Le dernier échec en vol du lanceur Soyouz remonte à avril 1975, vol Soyouz 18 à T+295 s avant de rejoindre Saliout 4. Le lanceur Soyouz FG a volé 54 fois sans échec depuis 2001, lançant les premiers Progress M1, les Soyouz TMA et les MS. Ce devait être normalement un des derniers vols de la version FG pour le Soyouz, les Russe devraient utilisé la version 2-1a dès le MS 14. Le prochain lancement d'équipage vers ISS est prévu en décembre, après le lancement d'un Progress MS10 avec un Soyouz FG.
L'anomalie sur le lanceur aurait eu lieu après l'éjection de la tour de sauvetage SAS (T+115 s) lors de la séparation des 4 boosters (block B, V, G et D). Un des boosters serait rentrés en collision avec l'étage central, le block A selon l'agence TASS. Un incendie se serait déclaré sur l'étage suite à l'éventrement d'un ou des réservoirs de carburant. A ce moment, le Soyouz encore dans sa coiffe est éjecté et entame un retour balistique au sol. (dessin A Zack)
L'équipage du Soyouz MS 10, le Russe Alexey Ovchinin et l'astronaute NASA Nick Hague
L'éjection de la cabine MS 10 est intervenu à une altitude de 50 km. Le Soyouz a ensuite atterrit 34 minutes plus tard. Les 2 astronautes ont encaissé 6,7G durant la descente. Sur le pad, le Soyouz est dans sa coiffe, laquelle est surmonté du système d'éjection SAS, constitué de plusieurs moteurs. Si un incident se produit au sol et jusqu'à T+ 20 secondes, une commande permet de séparer le Soyouz au niveau du module de descente. Les 2 moteurs au milieu de la tour sont allumés pour l'éloigner du lanceur. le pilotage se fait par 4 autres petits moteurs au sommet de la tour. A moyenne altitude, jusqu'à l'éjection de la tour, c'est pratiquement le même scénario avec seulement un moteur allumé. Lorsque le SAS est largué, il ne reste que la coiffe sur le lanceur. Si un incident se produit, 4 petits moteurs sur la coiffe assurent la séparation du Soyouz et son pilotage pour un retour au sol, comme dans le cas du MS 10. Quand la coiffe est largué, le Soyouz, en cas d'incident peut se séparé selon la procédure normale de vol (Nicolas Pillet: kosmonavtika.com). 24 octobre, les Russes savent maintenant ce qui a causé l'éjection prématurée de la cabine Soyouz MS10 lors du vol propulsé. Le problème se situe au niveau d'un des boosters latéraux du lanceur, un des 4 block entourant le corps central. Mauvais montage, ordre de séparation erroné, les Russes sont confiants pour une reprise des vols habités en décembre, après 3 autres lancements, depuis Kourou, Baikonour et Plesetsk. L'équipage du MS11 avec Kononenko, le Canadien St Jacques et l'américaine Mc Cain doivent décoller de Baïkonour début décembre, le 3 au lieu du 20 initialement planifié et rejoindre ISS. Après le retour au sol de Gerts, Aunon-Chancelier et Prokopyev le 20, l'équipage restera seul dans la station jusqu'en avril 2019. Selon le plan initial, le vol du 5 avril devait emporter Oleg Skripochka, Christina Koch et un astronaute des Emirat Arabes. Ce dernier, invité devait séjourner 10 jours dans ISS avant de revenir avec Hague et Ovchinin. Pour le moment, personne ne sait si l'astronaute partira en avril ou pas. En attendant, la station doit recevoir un cargo Cygnus et un CRS 16. 2 EVA sont également prévues pour changer des batteries, mais elles seront repoussé à 'arrivée de l'équipage de MS 11. La sortie pour inspecter le Soyouz MS 09 avant son retour sur terre est également prévue le 11 décembre, suite à la découverte d'une fuite dans son module orbital cet été.
Les 2 astronautes sélectionnes pour les Emirats Arbes Hazza Al Mansouri et le Sultan Al Neyadi à l'entrainement sur Soyouz. 27 octobre, après le succès du lancement d'un Soyouz 2 depuis Baïkonour le 25 octobre, le feu est presque au vert pour le lancement des Progress et Soyouz vers ISS. Progress MS 10 doit décoller le 18 novembre et rejoindre la station en 6 heures, ce sera le second essai de RV rapide avec amarrage sur l'arrière de Zvezda. Le premier essai de ce type a été réalisé par le M 16M, puis par le MS09.
Equipage original du MS 12, l'astronautes des Arabie Unis Hazza Al Mansouri, le Russe Oleg Skripochka et l'Américaine Christina Koch au centre d'entrainement de Moscou. Après l'échec du MS 10, cet équipage ne volera pas en 2019. 1er novembre, la commission d'enquête sur l'accident du Soyouz MS 10 remet son rapport. Comme pressenti, le vol avorté du lanceur a été causé par la défaillance d'un capteur sur un des 4 boosters latéraux. Le capteur est sensé commander l'ouverture d'une vanne de dégazage du LOX pour éloigner le booster du corps central. Au cours de ce vol, a T+118 secondes, le booster D n'a pu se séparer et a glissé le long du corps central, déchirant les réservoirs, mettant le feu aux moteurs. Déséquilibré de plus de 7° de sa trajectoire, le lanceur a initié une manoeuvre d'arrêt de vol éjectant la cabine et son équipage à T+121,57 s. Le vol du MS 10 a duré 19 mn 49 s, dont la majeure partie en vol balistique, l'équipage subissant des accélérations de 5-6 G. Selon la commission, le capteur aurait été déformé lors de son montage au moment de l'assemblage du lanceur à Baikonour. Les lanceurs actuellement en cours d'assemblage vont être inspecté. Depuis, un Soyouz a été lancé de Plesetsk le 25 octobre, un Soyouz doit lancer un satellite Uragan M et Arianespace doit lancé un Soyouz ST B le 6 novembre. Enfin, avant le prochain vol habité, un Progress doit rejoindre ISS le 16.
L'équipage Ovtchinine et Hague du MS 10 devrait partir sur le Soyouz MS 12 en avril. Le MS 13 sera normalement le dernier siège de Soyouz acheté par les Américains, en l'occurrence Andrew Morgan. Le MS 14 sera inhabité pour tester le lanceur Soyouz 2.1. Les premiers équipages américains Hopkins/Glover et S.Williams/Cassada sont officiellement annoncés sur les vaisseaux Dragon et Starliner pour 2019. Pour les Européens, normalement, Thomas Pesquet devrait voler en 2020, après Gerts et Parmitano (second vol). Le britannique Peake et l'Allemand Mogensen ne devraient pas revoler pour des raisons de politiques spatiales. L'italienne Cristoforeti et l'allemand Maurer sont en attente de mission. Le MS 12 doit décoller le 3 décembre.
L'équipage du MS 12 avec Mc Cain, Kononen et le canadien Saint-Jacques. Le cargo Japonais rentre dans l'atmosphère le 11 novembre. Juste avant sa désorbitation, il aura rehausser l'orbite de la station et avant de se désintégrer dans l'atmosphère, il largue une capsule autonome HSRC HTV Small Re entry Capsule emporter avec lui au lancement. Le HSRC, rempli d'échantillons d'expériences a été attaché au sas de la partie avant du PLC du cargo avant son départ d'ISS à la place de l'écoutille habituelle. La capsule se détache du cargo après sa rentrée dans l'atmosphère et descend en parachute en mer.
16 novembre, Progress MS 10 décolle de Baikonour pour rejoindre ISS dans les 2 jours. Ce lancement a été réalisé avec une version Soyouz FG (56e vol), la même version qui a causé la perte du Soyouz MS 10 en octobre. Il reste 5 exemplaires de ce lanceur qui vont être lancé d'ici la fin 2019. Le reste des Soyouz et Progress devraient par la suite être lancé par des versions 2.1a. Progress MS 10 doit s'amarrer à l'arrière de Zvezda et apporter 2500 kg de matériels.
17 novembre, le cargo d'Orbital ATK Cygnus John Young décolle de Wallop Island pour lui aussi rejoindre ISS d'ici le 18 sur le port Nadir d'Unity. La 10e mission du cargo Cygnus, initialement baptisée OA 10 est désormais appelé NG 10, depuis le rachat par Northrop Grumman d'ATK en juin dernier. Le cargo apporte 3500 kg d'équipements pour les astronautes et des équipements pour des expériences scientifiques (notamment sur la solidification des ciments, l'étude des changements dans la perception par les astronautes des mouvements, de la position du corps et de leur appréciation des distances, le test de la première imprimante 3D « spatiale » capable de recycler des déchets plastiques, l'évaluation d'une méthode de production de fibre optique et, en astrophysique, l'examen de la formation des chondres, parmi les plus anciens matériaux du système solaire). Elle comportera également du matériel pour la station ainsi que neuf Cubesats développés dans le cadre du programme Educational Launch of Nanosatellites (ElaNa) de la NASA.
3 décembre, nomination de l'équipage du Soyouz MS 12 en février 2019, Alexy Ovchini, Nick Hague et Chrsitina Kock. Soyouz MS 11 rejoint ISS en 6 heures s'amarrant au module Poisk L’équipage de l’expédition 58/59 est composé à nouveau de trois membres contrairement à la mission précédente, avec le russe Oleg Kononenko (expéditions 17, 30/31 et 44/45, l'Américaine Anne C. McClain et le Canadien David Saint-Jacques, aquanaute lors de l’expérience NEMO 15 en 2011. Ce 2 derniers réalisant leur premier vol. L'équipage devrait réaliser 2 EVA au cours de leur séjour et recevoir Progress MS 9 et 10, Cygnus NG11, Dragon CSR 16, 17 et 18 et V1 et le premier CST 100.
5 décembre, le cargo CRS 16 de Space X rejoint ISS. Ce lancement est le 1er d'une série de 5 cargo Dragon V1 pour la NASA dans le cadre du contrat CRS de décembre 2015. Ensuite, SpaceX passera au contrat de type CRS-2 avec des capsules cargo dérivées du Dragon Crew. Ce cargo apporte 2575 kg d'équipements pour les astronautes.
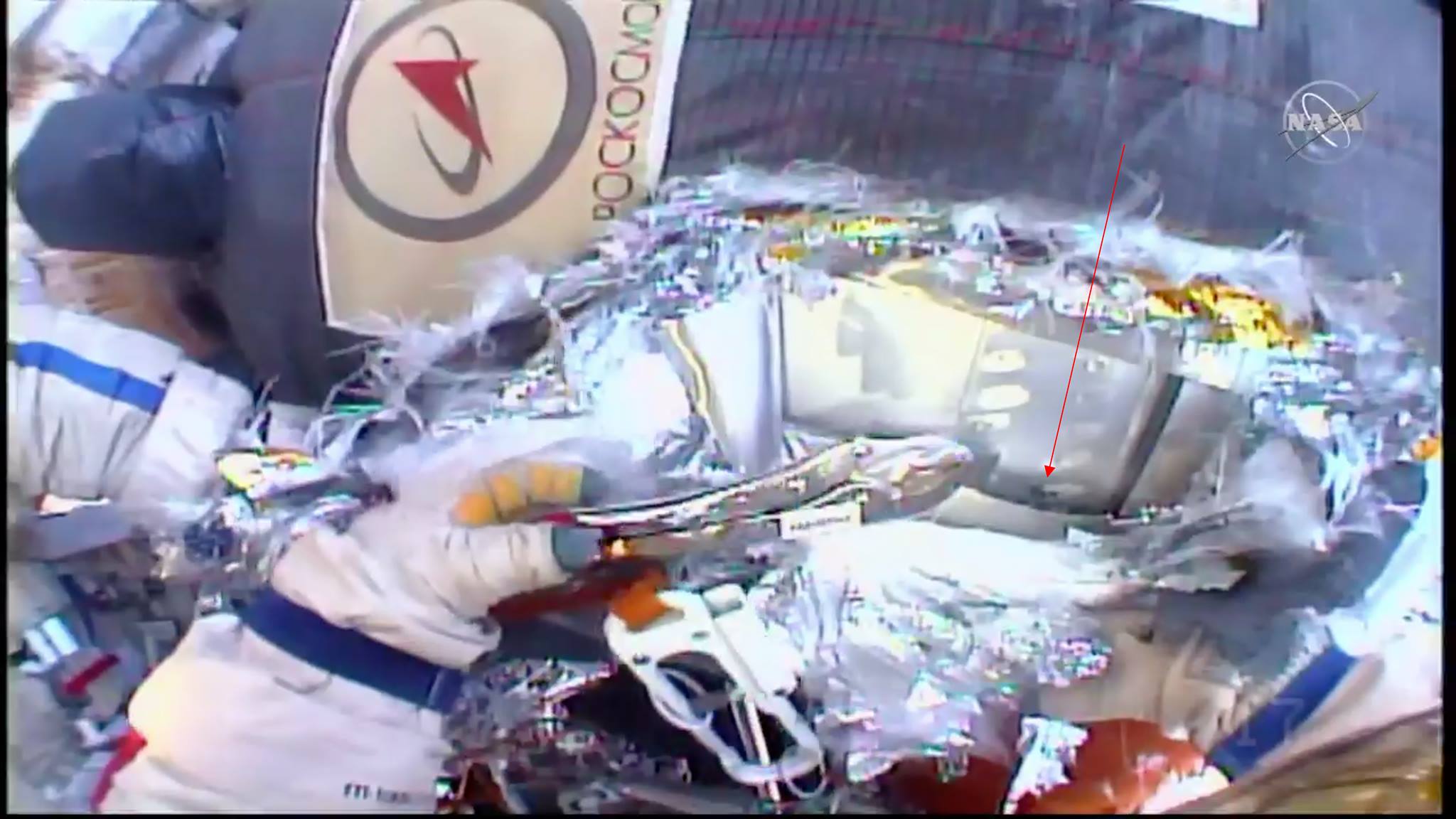
CRS 16, second vol du C112 qui a volé sur CRS 10 en approche d'ISS le 8 décembre 11 décembre, les cosmonautes Kononenko et Prokopyev sortent 7h 45 dans l''espace pour inspecter le module orbital du vaisseau Soyouz MS 09. Une fuite a été découverte sur celui ci en aout, fuite qui a été colmaté de l'intérieur. A l'aide d'un gros couteau et un outil de coupe, les 2 hommes ont coupé un morceau de l'isolation thermique de la cabine et du bouclier anti météorites pour visualiser le trou. Les cosmonautes ont réalisé des photos et récupère des échantillons à la surface du trou et enlevé de petites parties du bouclier anti météorite censés présenter des traces de perçage qui seront renvoyés sur terre au retour du MS 09. C'est la 213 eme EVA depuis ISS totalisant 1335 heures et la 8eme de 2018.
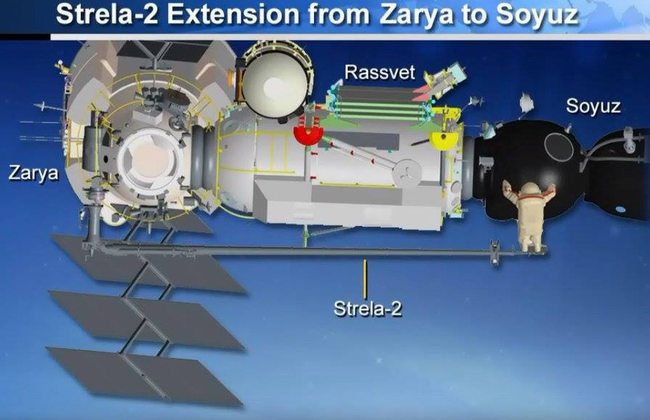
Sortis du sas Pirs (amarré à Zvezda vers la terre) sur lequel est amarré Progress MS10, les 2 cosmonautes ont du prendre le bras GStM- 1 (monté sur Poisk de l'autre coté de Zvezda) pour se rendre vers le module Zarya et ensuite déployer le bras GStM 2, à l'avant de Zarya, pour rejoindre le Soyouz amarré sur le MRM 1 Rassvet (port nadir de Zarya)
Après 5 heures 20 de travail, le trou est enfin trouvé. La flèche rouge pointe la partie noire de la résine époxy qui a servit à colmater la fuite de l'intérieur. 20 décembre, retour de l'équipage Sergey Prokopyev, Serena Auñón-Chancellor et de l'astronaute Allemand Alexander Gerst à bord du Soyouz MS 09 après un vol de 196 jours et 17 heures et 50 minutes. L'astronaute ESA, dont c'est le second vol cumule 362 jours dans l'espace.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||