|
|
|
DEVELOPPEMENT DE L'ATV 2008 L'ATV n° 1 "Jules Verne" est au CSG à Kourou dans l'ensemble de préparation de charges utile S5. Les deux modules le composant ont été assemblé en décembre dernier. Le 4 janvier l'ATV est déplacé du hall S5C vers le S5B pour être remplit en carburant. Le S5 dispose de deux bâtiments pour ces opérations, le S5A et B, d'environ 400 m2 de surface, ce dernier permet le chargement de satellites de grande capacité (jusqu'à 10 tonnes d'ergols). L'ATV est chargé en MMH et MON pour alimenter ses 4 moteurs et en UDMH et N2O4 pour le module de service russe attaché à ISS.
BIL, mise en place de l'étage EPS sur Ariane 5.
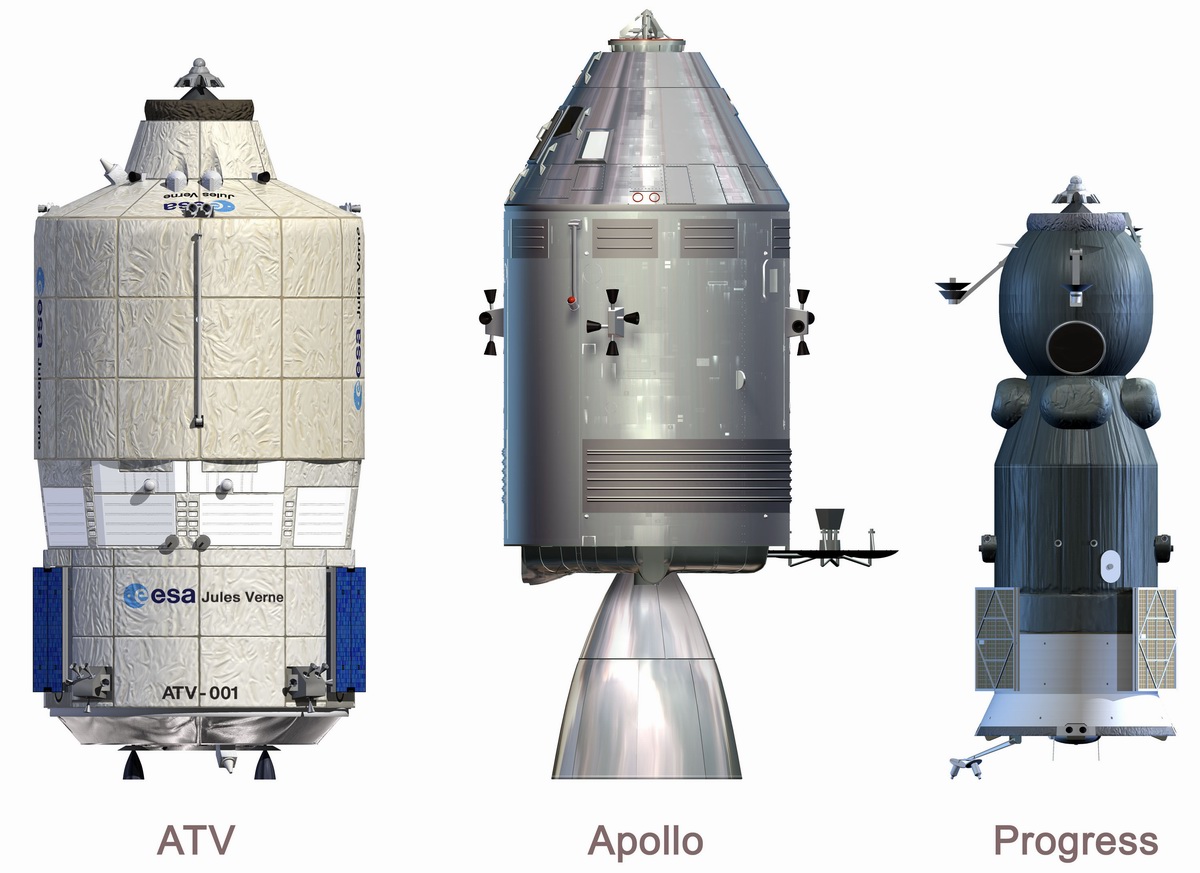
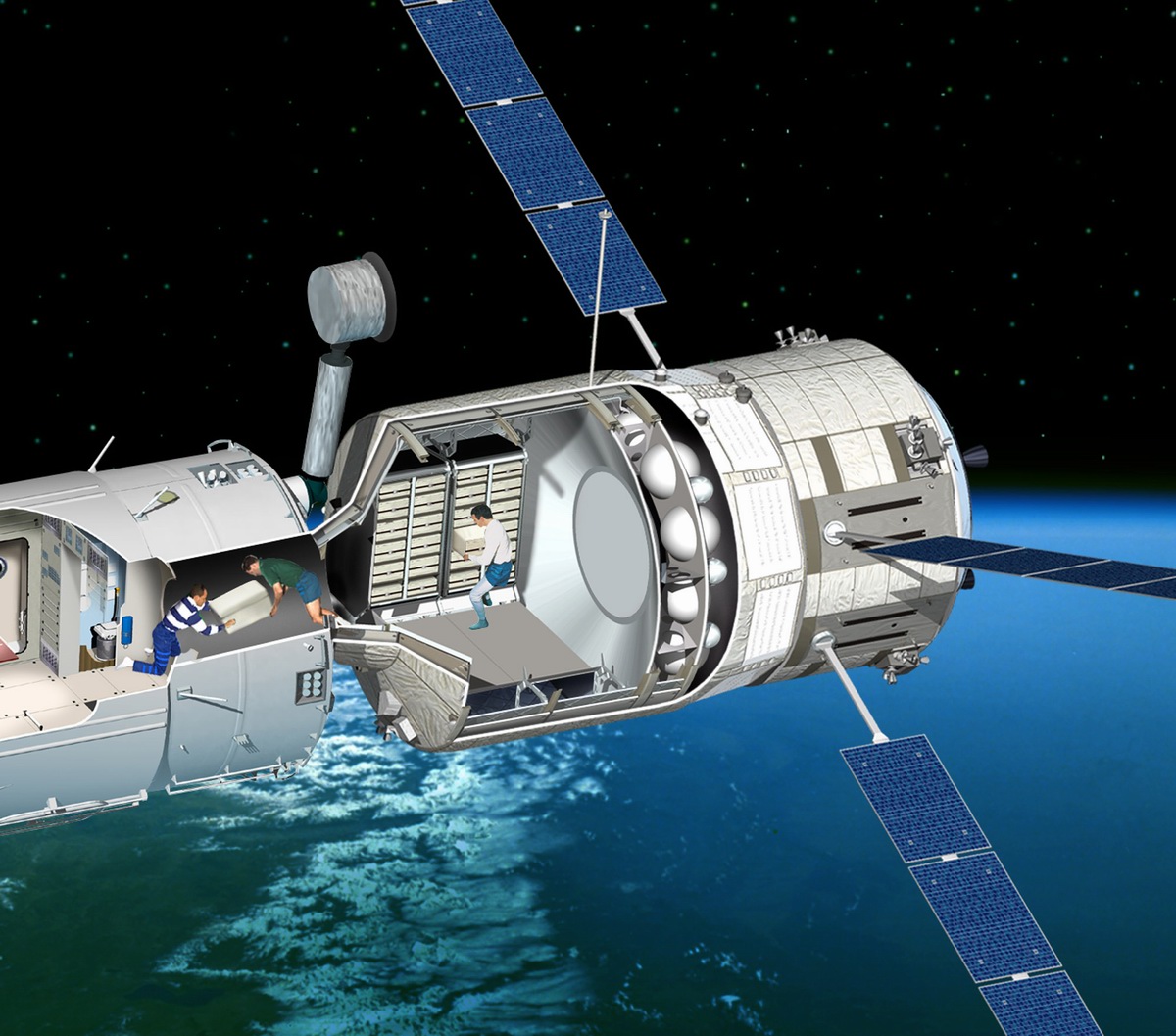
D'autre part, l'intégration des principaux modules de l'ATV-2 a commencé pour un lancement en 2010. Ce 2e modèle de vol devrait lui aussi recevoir un nom, d'origine allemande (l'Allemagne participe en second à sa construction). ATV 1 "Jules verne" L’ATV est un vaisseau cargo entièrement automatisé et non-habité destiné à ravitailler l'ISS. Il est une des contribution majeure au programme avec le module Columbus. Depuis août 2000, l'approvisionnement de l'ISS en vivres, air et divers équipements est assuré tous les 3 mois environ par un nouveau vaisseau-cargo Progress M. Le vaisseau russe permet également de rehausser l'orbite de la station (qui peut décliner de 300 m chaque jour) et sert de "vide-ordures" à la fin de sa mission, lorsqu'il est précipité dans l'atmosphère et s'y consume. L'ATV le remplacera à long terme avec la livraison de 8 tonnes de fret (gaz, eau, ravitaillement divers) vers la station à chaque vol. Après un voyage de 3 jours, il s’acquitte de sa mission puis reste amarré 6 mois à la station, dont il contrôle régulièrement l’altitude qu’il est chargé de rehausser en cas de nécessité grâce à son système de propulsion.
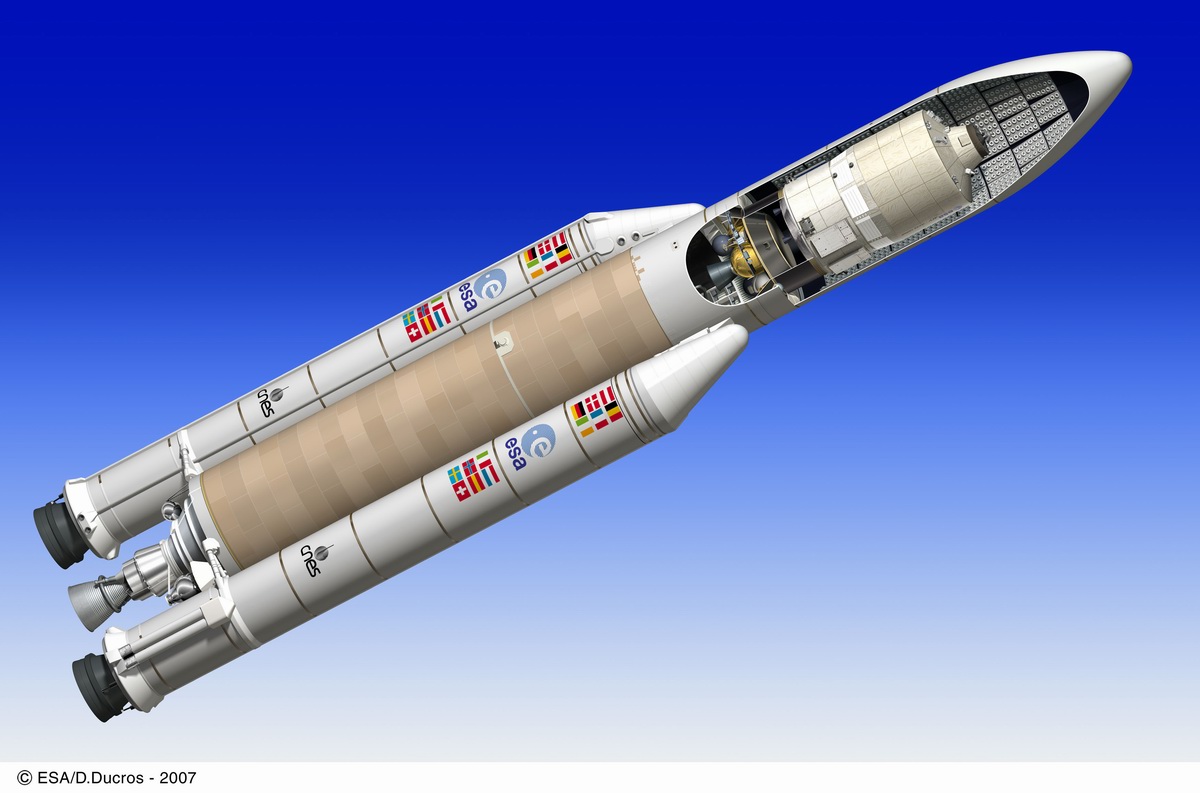
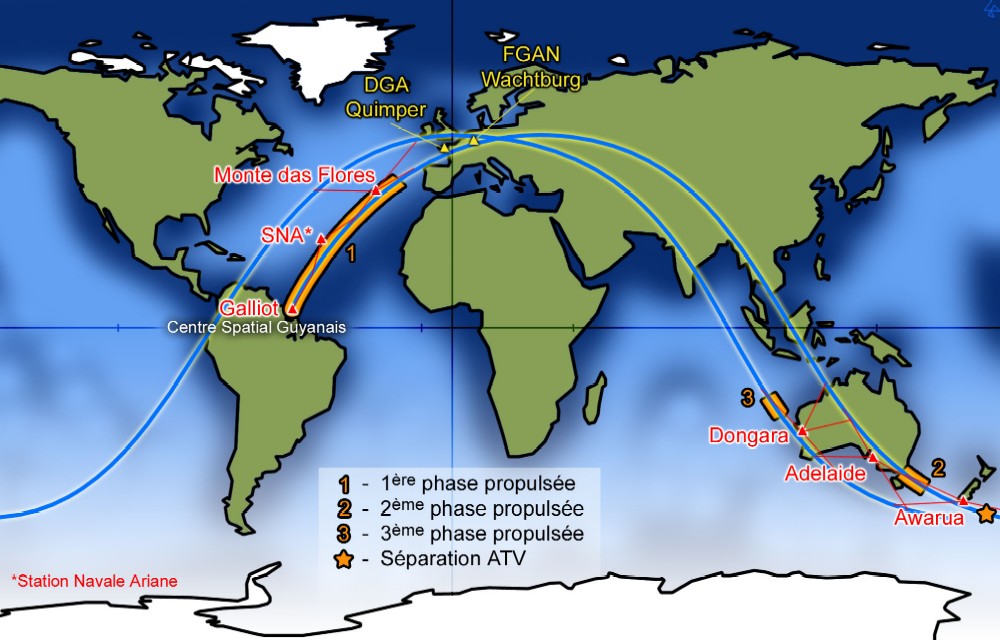
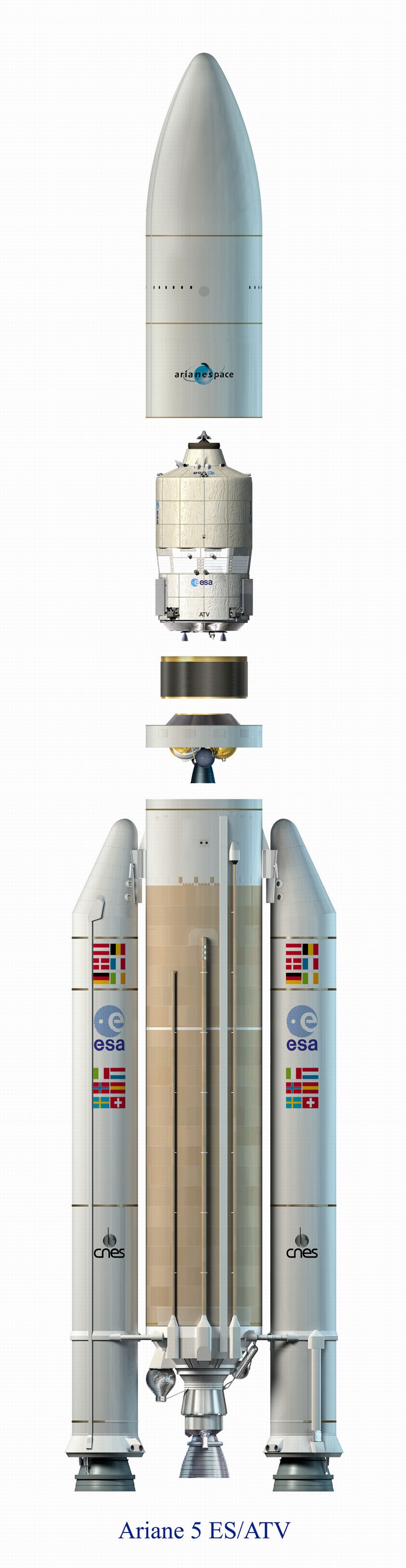
L'ATV est un vaisseau de 21 tonnes au lancement mesurant 10,3 m de long pour 4,5 m de diamètre et 22 m d'envergure ses panneaux solaire déployés. C'est une Ariane 5 ES ATV qui le propulse vers son orbite inclinée à 51,6° à 260 km d'altitude. Cette Ariane 5 est équipée d'un étage supérieur rallumable à ergols stockable (5200 kg de carburant soit un peu plus de la moitié de sa capacité habituelle). Une première manoeuvre circularise l'orbite à 260 km et une seconde assure la retombée de l'étage EPS dans l'Océan Pacifique après sa mission (après 2h 30 mn). Le moteur Aesus a subit toute une série d'essai au banc pour le qualifier pour cette mission, notamment au niveau de la température des ergols. La température du moteur et des ergols est en conséquence contrôlée avant le lancement par la mise en place d’un système de réchauffage incluant des résistances électriques semblables dans leur principe aux systèmes de réchauffage des pare-brises de voitures , mais en plus puissant. Ces procédures ont été validées en grandeur réelle lors de lancements utilisant l’étage EPS qui ont précédé celui de l’ATV. L’ATV est directement monté sur la case à équipements du lanceur. De part sa masse, 21 tonnes, une structure renforcée en matériaux composite a été développé. En outre, le système de contrôle d’attitude en orbite, installé sur la case, a été adapté pour manoeuvrer l'ATV dans les conditions particulières de cette mission longue avec des amplitudes thermiques importantes. Ariane 5 doit atteindre la station ISS qui navigue sur une orbite inclinée à 51,6°. Pour assurer le suivi du lancement et le recueil de la télémétrie, de nouvelles stations de poursuite ont été qualifié aux Açores (station SMA à Monte das Flores), en Nouvelle-Zélande (station mobile à Awarua) et en Australie (station de l’Institut de Recherche en Télécommunications à Adélaïde et celle de USN à Dongara) en plus de celle utilisées habituellement à Galliot (Kourou CSG). Une station mobile SNA (Station Navale Ariane) a été positionnée dans l’Océan Atlantique. Quatre années ont été nécessaires pour définir l’emplacement des stations, établir le contact avec les interlocuteurs locaux, adapter et déployer les moyens. Au final, le CSG a du compléter son réseau qui mobilisera 6 stations et 2 radars.
Après la mise sur orbite et une phase de "sommeil", l'ATV sera le 1er vaisseau européen à réaliser un rendez-vous dans l’espace (navigant à l'aide du système GPS) et le premier amarrage automatique avec une station orbitale (se guidant à l'aide de lasers avec une précision de l'ordre du cm). Les manœuvres seront commandées depuis le centre de contrôle ATV-CC au Centre spatial de Toulouse et suivies en direct par l'équipage de l'ISS et le centre de contrôle américains et russes. Après son amarrage au module russe Zvezda de l'ISS, l'ATV servira d'extension pressurisée de l'ISS durant près de 6 mois. Quatre autres missions d'ATV sont ensuite prévues jusqu’en 2013. Le 7 mars, Ariane 5 est amené en Zone de Lancement 3 vers 14h 30, heure locale (17h 30 TU) avec quelques heures de retard sur le planning (problèmes d'air conditionné sous la coiffe). C’est un lanceur de type A5 ES, intermédiaire dans la gamme Ariane 5. Le lanceur 528 dédié à cette mission est le 33ème lanceur de production, le premier de la série A5ES : il est constitué d’un composite inférieur ‘’P2’’ identique à celui de la version A5/ECA (EAP à segment S1 surchargé, EPC type P2 avec moteur Vulcain 2) et d’un composite supérieur comprenant un EPS P2000 et une case à structure composite; ce lanceur est le douzième lanceur complet livré à Arianespace, intégré et contrôlé sous la responsabilité d’Astrium au Bâtiment d’Intégration Lanceur (BIL) à Kourou. Le Vol 181 est le 37ème lancement Ariane 5, 33ème mission commerciale du lanceur et le premier lancement de l’année 2008. 8 mars, à 16h 33 (H-11h 30) débute le compte à rebours final avec les tests électrique, la mise en configuration de l'étage EPC pour le remplissage, la préparation du pad de tir, le chargement des logiciels de vol, les tests radio fréquences, l'alignement de la centrale inertielle, la pressurisation des réservoirs au sol pour le remplissage et le remplissage de l'EPC à H- 4h (vers 20 h 25, locale). Le remplissage durera deux heures, mais il continue jusqu'à H-3 mn avec des compléments de plein. Une fois l'ATV mis sous alimentation interne pourra commencer la séquence synchronisée à H-6mn. L'heure officielle de lancement est confirmée à h- 3mn 30.
9 mars, 4h 03, Ariane 528 quitte l'ELA 3. La monté est vite obscurcit par les nuages mais le vol propulsé est nominal. A 2mn 28 s, les EAP sont largués suivit de la coiffe à 3mn 33 s. A T+ 9mn, l'étage EPC est arrêté. L'EPS prend la relève pour 8 minutes environ. A 4h 20, l'étage EPS place l'ATV sur une première orbite avec un périgée de 146 km. Une phase balistique permet de gagner l'apogée de cette orbite à 260 km qui est circularisée à 5h 05, 62 minutes après le lancement. L'ATV est séparé à 5h 09. Le contrôle est pris par le centre de Toulouse. Les panneaux solaire sont déployées à 5h 41. Au Centre de contrôle de l'ATV (ATV-CC) à Toulouse, les équipes sont à l'œuvre pour les premières opérations en orbite du « Jules Verne ». Après l'acquisition des liaisons avec les satellites-relais américains TDRS (Tracking & Data Relay Satellite), l'acquisition des étoiles de référence par les capteurs stellaires et le déploiement des panneaux solaires, l'ATV a activé ses récepteurs GPS pour la navigation. L'ATV-CC va pouvoir se baser sur ces données GPS pour établir une orbitographie plus précise de l'ATV et ainsi préciser la date des prochaines manœuvres de "phasage" orbital avec la Station spatiale internationale. L'amarrage avec la station est prévu le 3 avril. Dernier déploiement sur l'ATV « Jules Verne », un peu plus de deux heures après sa séparation d'avec l'étage supérieur d'Ariane 5, celui du mât de 2,15 m porteur d'une des deux antennes du système de communication de proximité (PCE - Proximity Communication Equipment) qui permettra à l'ATV de communiquer directement avec l'ISS quand il s'en approchera à moins de 30 km. Ce mât joue un rôle important car il empêche le "masquage" des antennes par les différents appendices de la Station lors de l'approche finale.
Après la mise en orbite de
"Jules Verne", le centre de contrôle de Toulouse le prend en
charge. Tous les systèmes de navigation à bord,
capteurs stellaires et récepteurs GPS fonctionnent nominalement et les
panneaux solaires, qui se sont déployés avec une grande douceur,
fournissent leur pleine puissance. Un premier problème apparaît
sur les centres de contrôle des moteurs, les PDE
Propulsion Drive Electronics. Les calculateurs
de bord ont détecté une légère différence de pression entre le
carburant et le comburant qui alimentent la propulsion. En réaction, l’ATV
a immédiatement basculé sur la deuxième de ses quatre chaînes de
propulsion, ainsi qu’il a été conçu pour le faire. Les ingénieurs à
Toulouse et sur Paris sont en train d’évaluer et d’analyser les données
en provenance du vaisseau et de déterminer les conséquences, s’il y en
a, sur le programme des prochaines opérations. 10
mars, L'ATV-CC réintègre le PDE2 dans la configuration nominale du système
de propulsion de l'ATV Jules Verne. Au cours
d’une opération complexe, des instructions pour réintégrer un boîtier
électronique qui commande cette partie du système de propulsion ont été
envoyées au vaisseau depuis Toulouse. Après avoir entièrement désactivé
le système propulsif, les quatre chaînes de propulsion ont été
progressivement réactivées, ce qui a permis de rétablir l’intégralité
des redondances.
Le lendemain,
le centre procède à deux tests d'allumage des moteurs de l'ATV à 15h54
et 17h06 pour commencer le phasage orbital
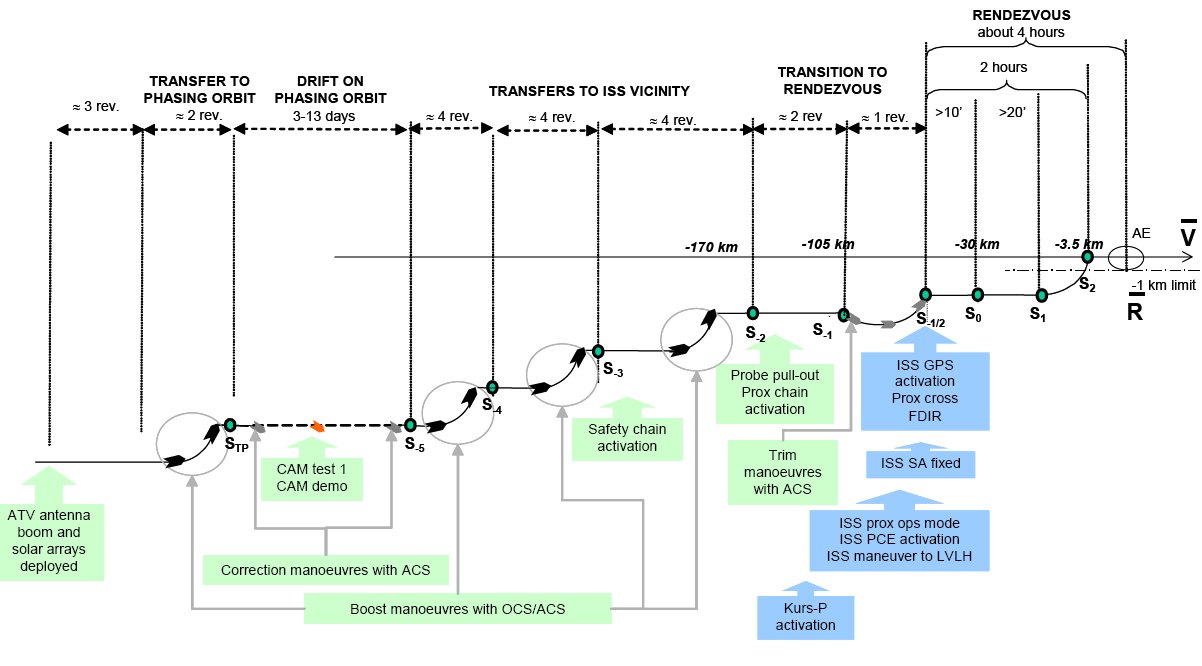
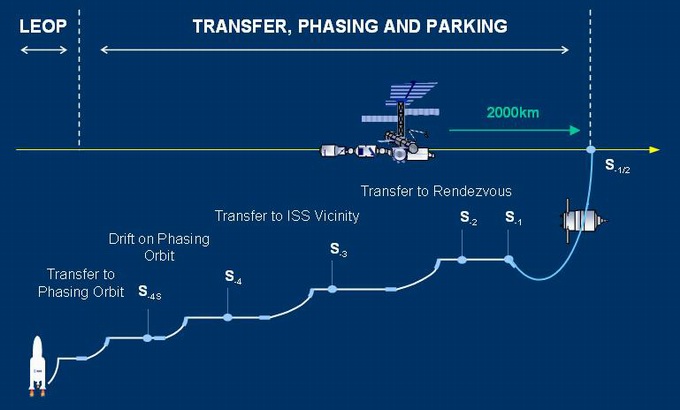
avec ISS. 12 mars, l'ATV réalise deux mises à feu (13h 20 et 14h 01) avec deux de ses quatre moteurs de manoeuvre, propulsant le vaisseau à 303 km d'altitude. Chaque allumage a duré deux minutes fournissant un delta V de 6 m/s. Le satellite relais de l'ESA Artemis surveillait l'opération, via la station sol de Redu dans les Ardennes belges. Artemis sert normalement de doublure au réseau américain TDRS pour les liaisons avec l'ATV et aujourd'hui, ce réseau souffrait justement d'un "trou" dans sa couverture. La manoeuvre d'évitement de collision CAM est prévu le 14 mars. 13 mars, le système de secours qui gère la CAM (Collison Avoidance Manoeuvre), la manoeuvre anti collision d'urgence est testé dans l'après. A 14h 30, le centre de Toulouse a envoyé une commande pour démarrer la procédure d'essai. Il s'agissait de voir si les deux calculateurs MSU 1 et 2 (Monitoring Safety Unit), qui constituent le cœur des chaînes fonctionnelles de secours, étaient capables de prendre la main et ils l'ont fait. 14 mars, le centre de contrôle de Toulouse réalise la manoeuvre anti collision CAM. A 8h57, heure locale, le MSU (Monitoring & Safing Unit) a pris le contrôle de l'ATV exactement comme prévu. Il a commandé l'allumage de quatre propulseurs dans le sens inverse du vecteur vitesse. La mise à feu, qui a fourni une poussée d'environ 5 m/s, a été exécutée à la perfection, après que le vaisseau s'est placé en mode de survie, pointé vers le Soleil pour assurer de la puissance via ses panneaux solaires, sous la supervision du MSU et avec une contrôle d'attitude assuré par un ensemble de gyroscopes. Par la suite, l'équipe a parfaitement réussi à ramener le vaisseau en mode opérationnel nominal. Il y a eu un redémarrage complet (et intentionnel) des calculateurs de bord de l'ATV. L'ATV est revenu en mode de croisière. La mise à feu de 200 secondes s'est déroulée comme prévu. Les propulseurs ont délivré un deltaV (un freinage) de 5 m/s. Selon les résultats du calcul de la nouvelle orbite, il pourrait y avoir quelques corrections d'orbite à effectuer, peut-être avant la fin de la journée, durant le week-end et une autre vers le 18 mars. L'objectif est de rejoindre l'orbite de parking en avant de l'ISS le 19 mars. 17 mars, la NASA signale à l'équipage de l'ISS que l'ATV est après eux ! Dans les prochaines heures, le « Jules Verne », vu de la Station, devrait même se lever au-dessus de l'horizon. Et comme c'est la Saint Patrick, il a été promis une "boisson verte gratuite" au premier astronaute qui le repèrerait visuellement. L'ATV se trouve encore à plus de 3500 kilomètres derrière l'ISS et même dans de bonnes conditions d'éclairement, il faudra une très bonne vue pour parvenir à le voir à l'œil nu ! 19 mars, peu après 13h00 CET, le « Jules Verne » s'est installé sur une orbite de "parking", à quelque 2000 km devant l'ISS et environ à la même altitude qu'elle, afin d' y patienter en attendant la première d'une série de manœuvres d'amarrage qui doivent débuter à la fin du mois de mars. La nuit précédente, l'équipe de contrôle de mission de l'ATV a réalisé deux mises à feu en utilisant la chaîne de propulsion n°2 - ce qui leur a permis de vérifier les régulateurs de pression - tout s'est bien passé. Le premier allumage a eu lieu à minuit et le second vers 01h00 CET. Des ajustements d'orbite on ensuite été commandés à 11h51, 12h06 et 12h51 CET. Des corrections de trajectoire ont également eu lieu les 13 et 16 mars, lorsque l'ATV a pénétré dans la zone TIV ("Transfer to ISS Vicinity"). L'un des événements importants à ce moment à a été le passage de l'ATV à la verticale de l'ISS - à environ 30 km en dessous d'elle. Tous les enregistrements de progression et d'opérations de mission de la période de transfert et de phasage d'orbite qui vient de s'achever ont été soumis aux partenaires de l'ISS sous la forme d'un rapport qui sera examiné le 25 mars. Ce jour-là se tiendra une revue technique formelle pour valider le démarrage des "journées de démonstration" à partir du 29 mars (1ère journée e démonstration le 29 mars, 2e, le 31 mars). L'équipe confiante en le plein succès de cette validation. Maintenant que la période de transfert et de phasage est accomplie, l'ATV a passé toutes les étapes prévues, que ce soit en contrôle d'attitude (démonstration de sa capacité de manœuvre en lacet, y compris le mode de pointage vers la Terre et le pivotement), navigation au GPS absolu (démonstration de la capacité de l'ATV-CC à effectuer la navigation orbitale sur la base des informations collectées par les récepteurs GPS de l'ATV) et contrôle orbital (démonstration de la capacité de l'ATV à exécuter des manœuvres orbitales).
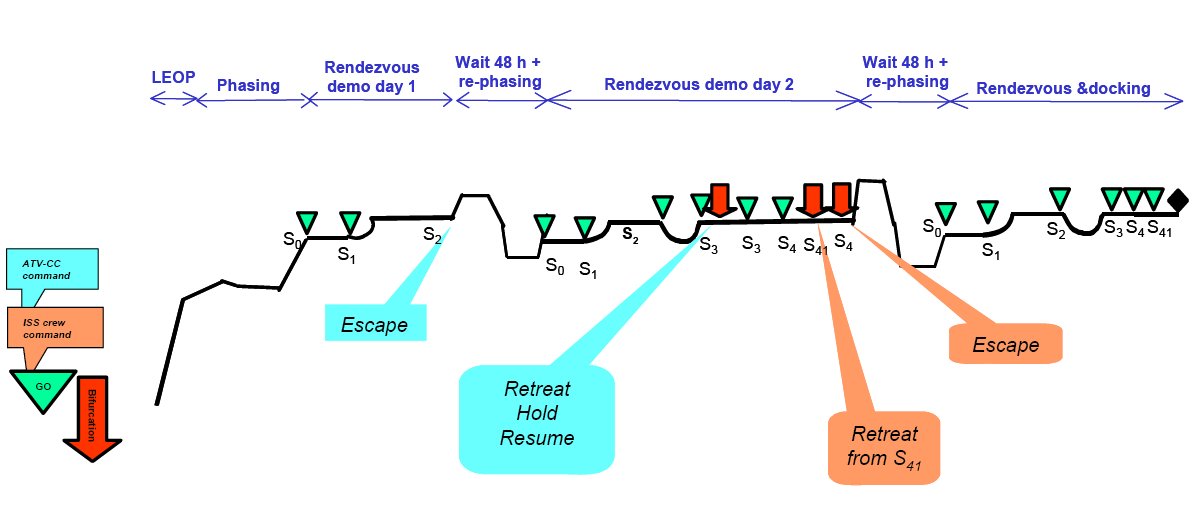
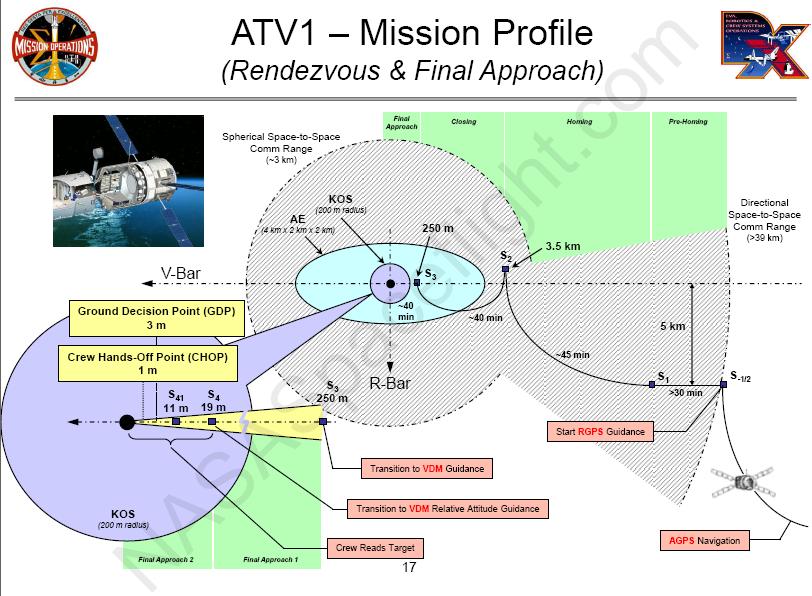
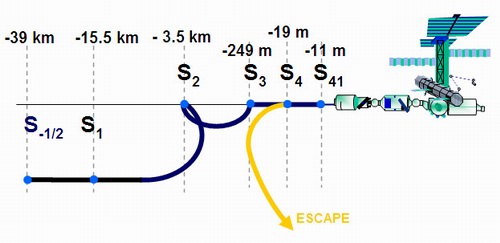
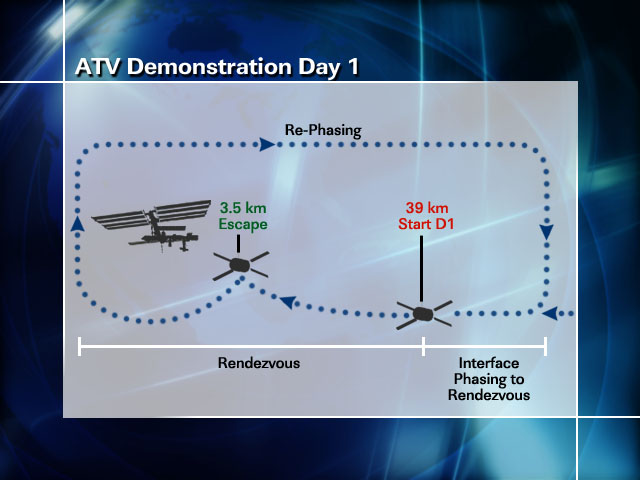
Graphique indiquant les étapes accomplies par l'ATV depuis son lancement. Les nombreux points indiqués avec la mention "Sx" correspondent à des points intermédiaires de référence avec un positionnement et une distance spécifique par rapport à l'ISS. Nous entendrons beaucoup plus parler à partir du 29 mars, quand le « Jules Verne ” entamera sa première journée de démonstration - jusqu'au point S2, situé à 3500 m directement derrière l'ISS. 23 mars, Il semble que le véhicule ATV ait quelques soucis en orbite : suite à un manque de MLI (multi layer insulation), il a des problèmes de régulation thermique dans sa partie avant (cargo carrier). Autre soucis, deux thermistors qui se seraient décollés, devenant donc inutilisables. La conséquence est la désactivation du PDE 4 sur lequel ils sont rattachés (rien à voir avec la première panne de PDE...), mais il sont désormais déclarés Off, ce qui ne pose pas de problème. L'ATV continue doucement son attente en parking, pour le moment les manoeuvres prévues le 24 seront annulées car elles sont là pour corriger les dispersions, or il n'y a pas de dispersions. 27 mars, le premier demo-day est prévu le 29 mars. Ce matin vers 5h heures de Paris ont eu lieu des manoeuvres de départ du parking, en route vers le point S-1/2. Ensuite le début du rendez-vous sera fait si tout va bien jusqu'en S2 où une "escape" sera déclenchée. Cette démo va servir entre autres à vérifier le bon fonctionnement de la navigation relative, et la capacité à mettre l'ATV dans la "boîte S-1/2". Cette boîte correspond à l'erreur autorisée par rapport au point théorique. Elle est définie entre autres par la distance = 39km à 3 km près et la différence d'altitude = 0 à 500m près. Le demo-day 2 est prévu le 31, et le demo-day3, dit aussi docking Very Happy est toujours prévu le 3. Les horaires sont susceptibles de changer tous les jours, vu qu'ils sont calculés à partir des positions prédites de l'ISS fournies par les russes chaque matin. Et chaque matin, les prédictions pour le 29 sont un peu plus précises que celles de la veille. On a donc pour le Demo day 1: point le plus proche de 15h51 GMT à 17h29. (Paris GMT +1), lundi 31 Mars Demo day 2: point le plus proche à 16h38 GMT. (Paris GMT +2) et jeudi 3 Avril Amarrage: 14h41 GMT (Paris GMT+2). Les deux manœuvres principales (Demoday 1 et Demoday 2), permettront de démontrer la capacité de l’ATV à s’amarrer en toute sécurité à l’ISS et notamment à exécuter une manœuvre d’évasion commandée par l’équipage de l’ISS quand il ne se trouvera plus qu’à 12 mètres de la station. DEMO DAY 1 29 mars, l'objectif des activités de cette 1ère journée de démonstration est de confirmer que l'ATV peut se repérer par rapport à l'ISS - grâce au GPS relatif - pour manœuvrer en toute sécurité jusqu'à un point spécifique, S2, situé sur l'orbite de la Station, à 3 500 m de distance derrière elle. Une fois que l'ATV « Jules Verne » sera parvenu au point S2, un essai de la manœuvre dite "d'échappement" sera réalisé. D'un point de vue dynamique, cette manœuvre est similaire à la manœuvre d'évitement de collision (la fameuse CAM - Collision Avoidance Manoeuvre) à la différence notable qu'elle utilise les systèmes principaux de l'ATV et n'entraîne pas son passage en mode de "survie"
L'ATV-CC a commandé au « Jules Verne » de quitter son orbite de parking, à 2 000 km en avant de l'ISS, le 27 mars, et depuis il a réalisé un série de manœuvres l'aide de ses propulseurs pour parvenir au point S-1/2, 39 km derrière l'ISS, approximativement à la même altitude. Pour la navigation relative, l'ATV et l'ISS déterminent leur position grâce aux signaux de la constellation de satellites GPS et ces données sont ensuite comparées pour obtenir des localisations relatives encore plus précises. Cette procédure est nécessaire pour les manoºvres de proximité.
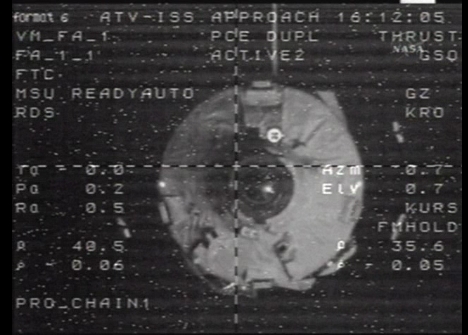
A 16h37, l'équipage de l'ISS a annoncé qu'il avait l'ATV « Jules Verne » en visuel.
Image prise quelques minutes plus tard sur les écrans de contrôle de l'ATV-CC à Toulouse. Le « Jules Verne » y apparaît comme un tache lumineuse sur le limbe de la Terre.
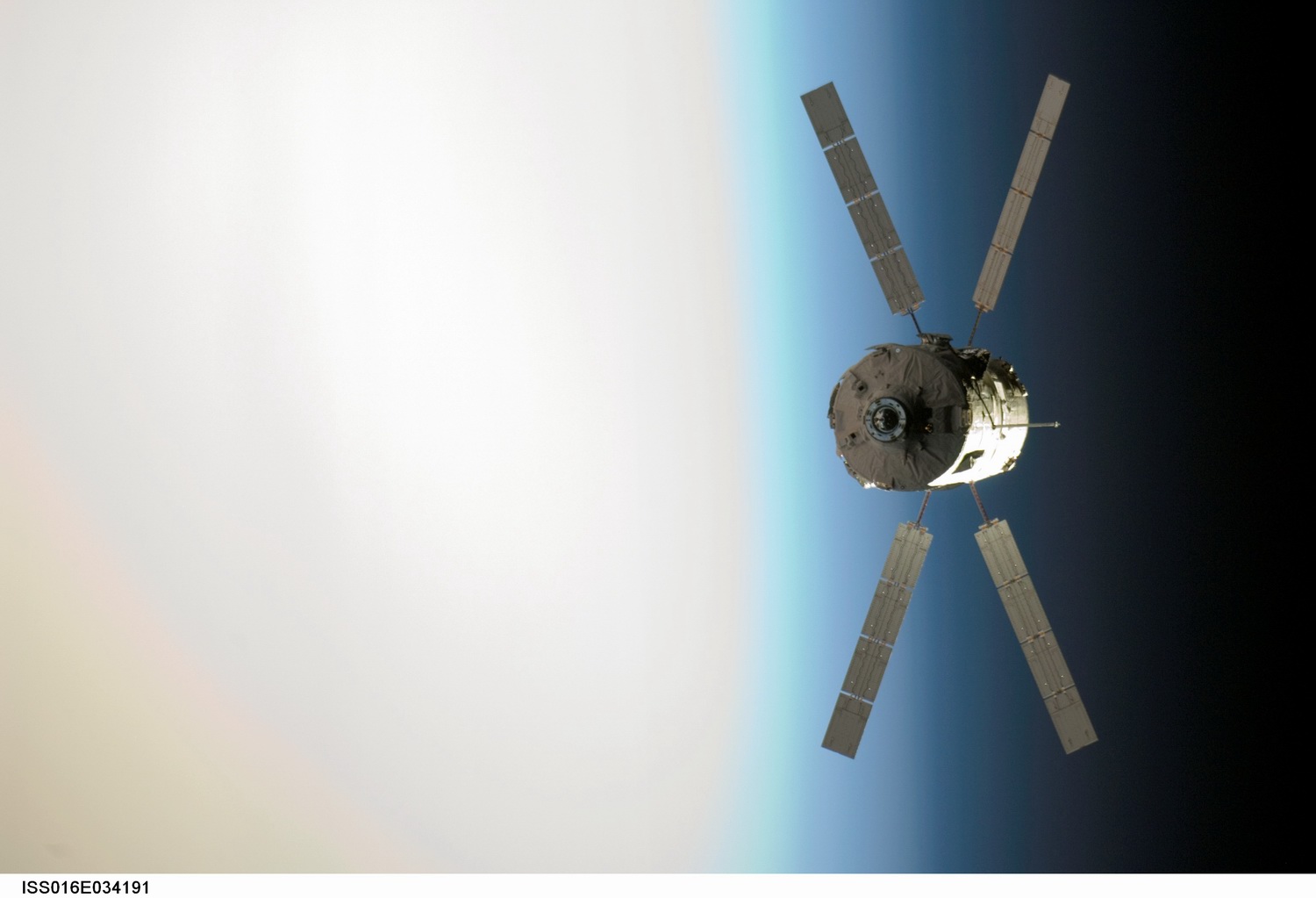
Malenchenko photographie l'ATV au 800 mm depuis le hublot de Zvezda. La commande "Echappement" est envoyée par le Centre de contrôle de l'ATV à 18h30, heure française. Sur les écrans de l'ATV-CC, le « Jules Verne » s'éloigne de l'ISS. L'équipe est maintenant en train d'analyser les données recueillies.
La démonstration de ce Demo Day 1 a confirmé que le « Jules Verne » est capable d'établir une liaison bidirectionnelle continue avec l'ISS pour l'échange de données. Grâce à cette liaison à haut débit en bande S, qui a été établie à une distance de 40 km de l'ISS, le « Jules Verne » a pu pour la première fois effectuer des mesures en GPS relatif avec la Station. Le GPS relatif est une technique de navigation qui permet aux calculateurs de l'ATV de comparer les données fournies par les récepteurs GPS de l'ATV et ceux de l'ISS pour naviguer avec grande précision par rapport à la Station. Pour l'équipe de contrôle à Toulouse comme pour l'équipage de l'ISS, cette liaison à 64 kbits/s a aussi rendu possible la démonstration de toutes les connexions cruciales de communications et d'échanges de données entre le vaisseau et la Station, y compris la capacité pour les systèmes de surveillance de chacun d'envoyer et de recevoir des informations. Quand le « Jules Verne » a atteint son point de stationnement le plus proche, à 3,5 km de l'ISS, le vaisseau a allumé ses feux de position et le système russe de transpondeurs radar Kours a été activé sur l'ATV et l'ISS. Ce système, utilisé depuis des décennies sur les stations et les véhicules russes, fournit une évaluation indépendante de la distance et de la vitesse relative pour l'équipage surveillant l'approche finale du « Jules Verne ». Au cours de la démonstration, les astronautes à bord de l'ISS ont signalé qu'il leur avait été possible de voir le « Jules Verne » à l'œil nu. Le vaisseau pouvait aussi être suivi via les différentes caméras de l'ISS sur les écrans de l'ATV-CC. Les données recueillies au cours de cette première journée de démonstration vont maintenant être analysées par l'équipe JADOR (Jules Verne ATV Demonstration Objectives Report) de l'ESA. Un rapport sera ensuite soumis à l'IMMT (ISS Mission Management Team). Après évaluation et autorisation le 30 mars, l'ATV pourra poursuivre sa mission avec une seconde journée de démonstration lundi, qui comprendra une approche jusqu'à 11 m de la Station. DEMO DAY 2 31 mars, l'ATV poursuit son programme de démonstration avec le "Demo Day 2" qui vise une approche de la station à 11 m de distance. A 14h 26, la manoeuvre commence avec le passage par le point de référence S-1/2 (S-moins-un-demi), à 39 km de l'ISS.
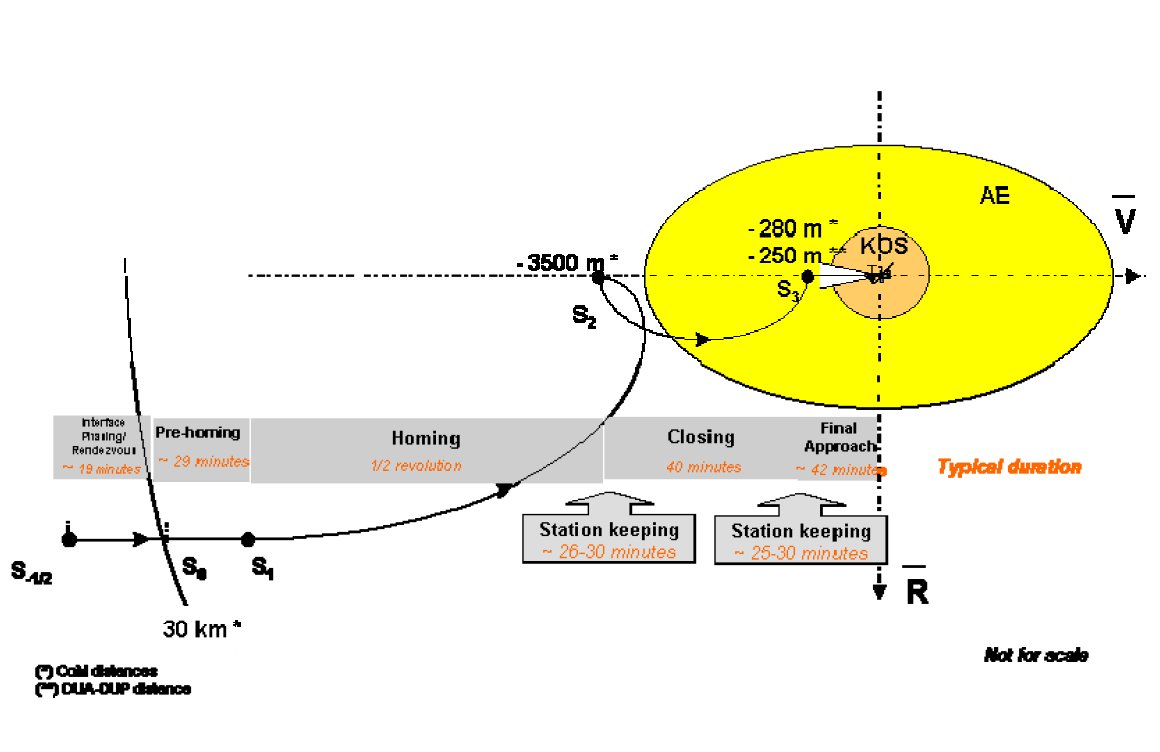
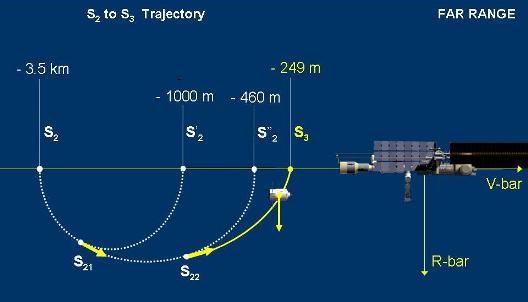
15h 12, l'ATV arrive au point S1 à 125 km de la station. A 16h, l'ATV est en attente à 2500 m au point S2. A 16h30, le centre de contrôle de Moscou donne le "go" pour que l'ATV quitte le point S2 et se rapproche d'ISS. Les propulseurs de 220 Newtons de l'ATV sont mis à feu pour 270 secondes (delta V de 1,7 m-s) afin de placer le vaisseau sur une trajectoire qui l'amènerait à environ 1 km de la Station si aucune autre mise à feu n'était programmées. Suit 510 secondes de vol balistique avant la seconde mise à feu de 180 secondes (delta V de0,9 m-s), puis une autre phase balistique de 600 secondes. La 3eme mise a feu dure 150 (delta V de 0,9 m-s). A 17h 03, après une dernière phase balistique de 340 secondes, l'ATV réalise sa 4eme mise à feu durant 350 s (delta V de 1,7 m-s) pour arriver au point S3 à 249 m de l'ISS. A 17h 10, "Jules Verne" est au point S3.
17h 19, l'ATV se retourne et s'aligne avec la station.
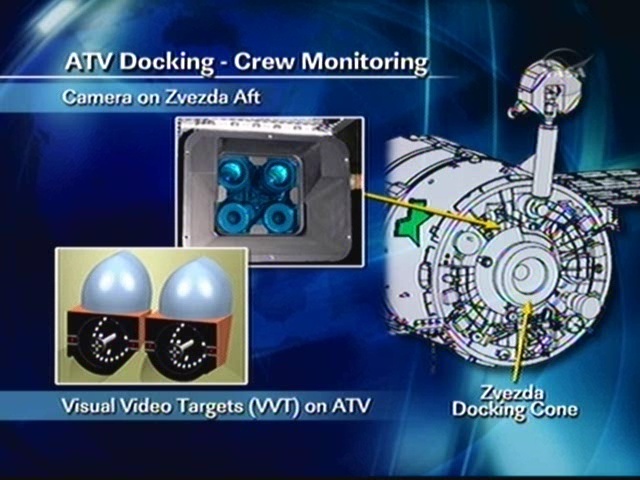
17h 24, initialisation de la navigation optique. Celle-ci utilise des vidéomètres pour observer les rétroréflecteurs à l'arrière de Zvezda, qui sont illuminés par des diodes laser à l'avant de l'ATV.
17h 27, les vidéomètres repèrent les rétroréflecteurs laser. Dans un premier temps ("navigation lointaine") ils ne calculent que la distance avec la face arrière de Zvezda. En S4 ils seront également en charge du contrôle d'attitude.
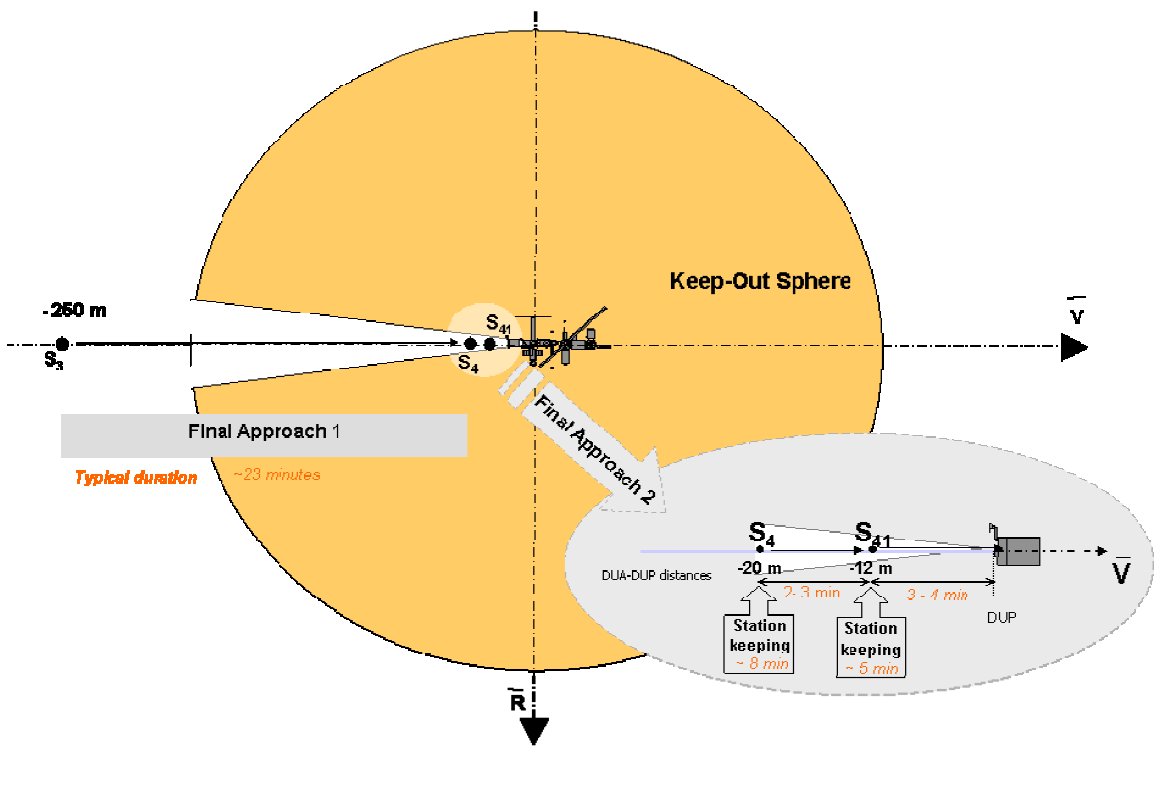
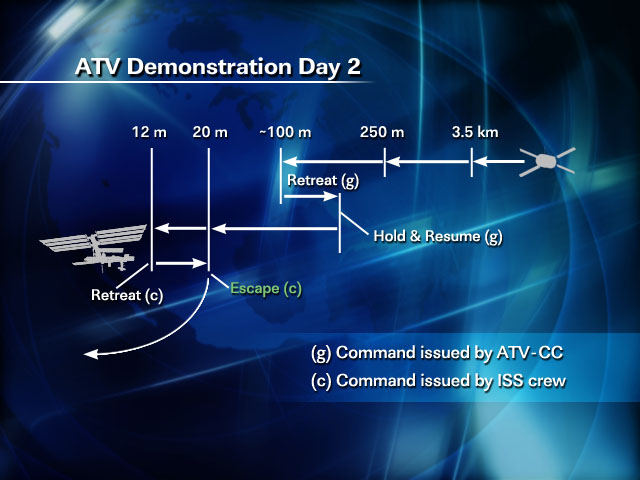
17h 47, l'ATV quitte le point S3 pour se diriger vers le point S4 à 20 m de l'ISS. A 17h 53, l'ATV-CC déclenche une manœuvre de "Retraite". L'ATV a ralenti puis annulé sa vitesse relative vers l'ISS et entamé un recul. Une fois que le succès de la manœuvre a été démontré, l'ATV-CC lance une commande "Arrêt" pour éviter que l'ATV ne retourne pas automatiquement en S3, mais s'immobilise. Deux minutes plus tard, l'ATV-CC envoie une commande de "Reprise" pour que l'ATV poursuive sa progression vers S4.
18h 13, l'ATV arrive au point S4 à 19 m d'ISS.
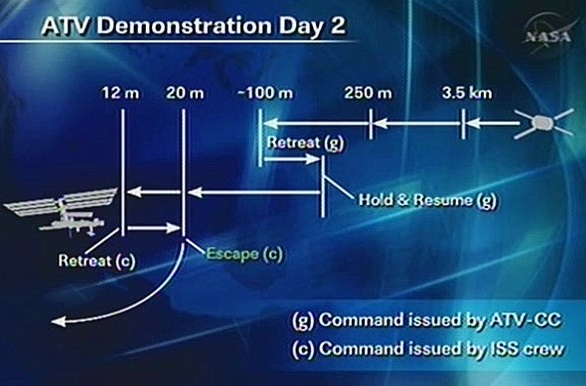
18h 35, l'ATV quitte le point S4 pour le point S41 à 11 m de Zvezda. 18h 37, l'ATV arrive au point S41 à 11 m du module russe Zvezda. 18h 42, après quatre minutes de vol en formation à 11 m d'écart, l'équipage de l'ISS envoie une commande de "Retraite" à l'ATV « Jules Verne ». Très lentement, l'ATV commence à s'éloigner pour retourner en S4 à 19 m. 18h 48, le centre de Moscou donne le "go" pour la manoeuvre d'escape. 4 minutes après, Yuri Malencehnko envoie la commande "escape". l'ATV s'éloigne rapidement de la station à 1 mètres par seconde. Jules Verne va rejoindre le point S-1/2, 39 km sous la station dans les 72 heures. Les données recueillies au cours de cette seconde journée de démonstration seront mises à disposition des responsables de l'ISS pour qu'ils puissent décider de l'autorisation pour la première tentative d'amarrage jeudi. L'amarrage de l'ATV « Jules Verne » avec l'ISS est prévu à 16h41 heure française (14h41 UT) le 3 avril.
DOCKING DAY 2 avril, l'lMMT (ISS Mission Management Team) donne son autorisation formelle pour la première tentative d'amarrage de l'ATV avec la Station le 3. Au fur et à mesure que le « Jules Verne » approchera de son objectif, les contrôleurs au sol de l'ATV-CC donneront l'autorisation à l'ATV de procéder étape par étape. Chaque étape requiert en outre l'autorisation du centre de contrôle de mission de Moscou (MCC-M), car l'ATV doit s'amarrer à Zvezda, sur la partie russe de l'ISS. 3 avril
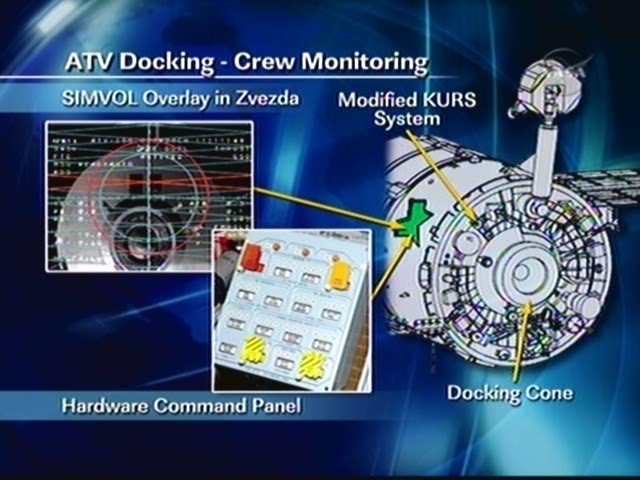
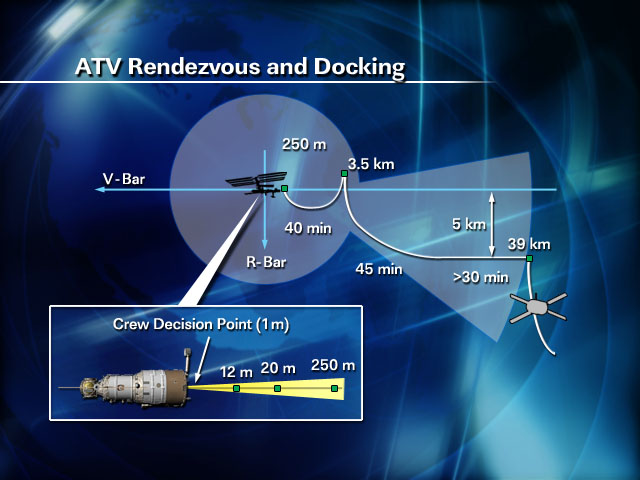
12h28 CEST, la liaison de communications directe entre l'ATV et l'ISS est établie. Elle permet le transfert des données de positionnement GPS pour la navigation par GPS relatif. 12h31m58s CEST, l'ATV « Jules Verne » passe par le point S-1/2, ce qui marque le début de la tentative d'amarrage. La marge d'erreur de positionnement à 39 km de l'ISS serait de 2 m. Depuis la salle de presse de l'ATV-CC les techniciens activent le « Bouton Rouge » commandant la CAM, la manœuvre anti-collision (Collision Avoidance Manoeuvre). 13h18m50s CEST, l'ATV « Jules Verne » vient de passer par le point S1, situé 15,5 km deriière l'ISS et 5 km plus bas. L'ATV est désormais visible sur les écrans de l'ATV-CC comme une petite tache de lumière sur le noir du ciel... rapidement "avalée" par le limbe lumineux de l'atmosphère terrestre. 14h05 CEST - Le « Jules Verne » vient de s'immobiliser en S2, à 3,5 km de l'ISS. Il restera à cette position pendant 30 minutes. Le transpondeur radar russe sur l'ATV est activé et les signaux sont apparus sur l'écran SimVol à bord de l'ISS. Ces mesures serviront à aider l'équipage de l'ISS pour estimer la distance et la vitesse relative durant son approche. A 14h36 CEST - L'ATV « Jules Verne » entame la première des quatre mises à feu qui vont l'amener de S2 en S3, à seulement 249 m de l'ISS. Avant de partir, les commandes "Arrêt" et "Retraite" ont été vérifiées. Leur bonne réception a été confirmée (mais volontairement non-appliquées). A 350 m de l'ISS, l'ATV nous offre son plus beau profil avant la dernière mise à feu qui l'amènera à s'immobiliser en S3, à 249 m de Zvezda. L'ATV arrive en position au point S3, à 249 m de l'ISS, à 15h16 CEST et commence sa manœuvre en lacet pour se réorienter en direction de la baie d'amarrage de Zvezda. Il doit rester en position en S3 jusqu'à 15h52 CEST. Depuis que l'ATV est à moins de 500 m de l'ISS, l'équipage utilise des masques transparents posés sur l'écran SimVol pour un repérage visuel de la position et de la vitesse de l'ATV ce qui leur permet de mieux surveiller son approche. L'ATV vient de passer en navigation optique, avec deux vidéomètres (un nominal et sa doublure) qui observent un faisceau laser pulsé émis par deux diodes à l'avant du vaisseau et réfléchi par des rétro-réflecteurs disposés à l'arrière de Zvezda. Le « Jules Verne » approche de son point de stationnement à 19 m de Zvezda. L'approche se fait dans la nuit orbitale, à la vitesse de 20 cm/s et ralentissant à 7 cm/s. Durant cette phase, l'équipage de l'ISS vérifie visuellement que l'ATV reste bien dans un cône de 15°. 16h 15, « Jules Verne » s'immobilise à 19 m de Zvezda. Il restera ici pendant une quinzaine de minutes avant d'être autorisé à poursuivre. 16h45 CEST, la sonde du système d'amarrage de l'ATV entre en contact avec le cône de la baie d'amarrage de Zvezda. Le dispositif de verrouillage a été "capturé" par le réceptacle à l'extrémité du cône. La sonde a ensuite été rétractée, amenant les deux colliers d'amarrage au contact et les huit crochets ont pu être verrouillés à 16h52 CEST. Une première entrée dans le module pressurisé du « Jules Verne » aura lieu le 4 vers 10h15 CEST. Il s'agira dans un premier temps de purifier l'air du module pendant huit heures avant que celui-ci puisse être ouvert pour de bon et que l'équipage puisse commencer à le décharger.
4 avril, planning des activités de la journée pour l'équipage de l'ISS : 10h00-11h25 CEST - Contrôle d'étanchéité
du "vestibule" entre les écoutilles de Zvezda et de l'ATV (Malentchenko). 5 avril, à bord de Zvezda, Youri Malentchenko et Peggy Whitson s'activent à préparer l'ouverture des écoutilles entre le module russe et le « Jules Verne ». La première entrée dans le vaisseau européen reste prévue vers 12h10 CEST. Personne n'a mis les pieds dans le « Jules Verne » depuis que le module a été scellé en décembre. A 12h17 CEST, l'équipage de l'ISS a
ouvert les écoutilles entre Zvezda et et l'ATV. Il y a eu un
"trou" dans la couverture par les satellites relais russes au
moment de l'ouverture proprement dite, mais lorsque la liaison est
revenue, l'équipage a annoncé avoir ouvert les écoutilles. La première
incursion à bord devrait suivre rapidement , après la prise d'échantillons
d'atmosphère. L'équipage a en fait accompli un certain nombre de tâches
pré-établies : 7 avril, un essai de mise à feu des moteurs de l'ATV est réalisé sous le contrôle du Tsoup de Moscou à 9h 40.
Le module Zarya possède trois port d'amarrage dont deux sont occupés par Unity via le PMA1 et Zvezda, le 3eme, au nadir servant pour les Soyouz. Zvezda possède 4 ports, un pour Zarya à l'avant, un pour l'ATV, Soyouz, Progress à l'arrière, un au nadir connecté à Pirs et un au zenit. 21 avril, l'ATV réussit sa manoeuvre de rehaussement d'orbite d'ISS. Le vaisseau a produit une légère accélération de 0,5 m-s pendant 2 minutes (rehausse de 1,49 km) pour vérifier sa capacité à "pousser" la station. La véritable manoeuvre de rehaussement, nécessaire parce que l'altitude de l'ISS baisse régulièrement en raison du frottement sur l'atmosphère résiduelle dans l'espace à 350 km, se déroulera le 25. La prochaine remontée de l'orbite prévue est entre 4 et 5 km, l'orbite passant de 345x329 km à 351x332 km (delta V de 2,5 m-s). 25 avril, l'ATV rehausse l'orbite de la station de 4,7 km lors d'une manoeuvre de poussé qui débute à 4h 22 TU et qui dure 12 mn 15 s. Le gain en altitude va permettre l'amarrage du Progress 29P et de STS 124 en mai. L'ATV doit se désamarrer le 7 août pour laisser la place à Progress M65, qui sera lancé le lendemain et s'amarrera le 14 à Zvezda. 30 avril, l'ESA décide de laisser l'ATV amarrer à ISS un mois de plus que prévu. Trois autres "rebost" d'ISS sont prévus le 12 juin, le 8 juillet et le 6 août. De plus 760 kg de carburant seront transférer vers Zvezda d'ici fin juin. les 240 kg d'eau seront pompés vers les réservoirs de Zvezda après analyses. L'ATV devait se détacher de la station vers le 10 août. Dans le programme d'assemblage, un Progress P30 doit s'amarrer le 14 à la station sur le port de l'ATV. Les russes pourrait le décaler après l'envol du TMA 13 en octobre. Depuis début
avril, l'écoutille de l'ATV a été laissé ouverte pour permettre le
déchargement de son contenu et offrir 48 m3 de volume supplémentaire
dans la station aux astronautes. Ainsi, l'ATV est devenu une salle de bain
pour ISS. L'équipage peut laver ses serviettes et se laver les cheveux
dans ce nouvel environnement. Certains en ont profité pour dormir
dedans.
9 juin, quelques uns des 28 micro propulseur de l'ATV sont testés par le centre de contrôle de Moscou afin d'étudier la dynamique des vibrations de l'ensemble de la station, maintenant alourdit par l'ATV et les modules japonais. 17 juin, l'ATV est utilisé pour la première fois pour transférer 811 kg de carburant vers ISS. L'opération prend environ une demi heure pour transférer 280 kg d'UDMH et 530 kg de N2O4 vers la partie russe. A cause de la toxicité des carburant, toutes les canalisations sont situées à l'extérieur du véhicule et passe à travers l'écoutille d'amarrage. Le transfert préparé par le centre de Toulouse est automatique et ne nécessite pas la présence de l'équipage de bord. Le lendemain, le centre de contrôle russe, le TSOUP purge toutes les lignes d'alimentation afin qu'aucun résidu de carburant ne coule lors de la séparation de l'ATV en octobre.
L'équipage d'ISS avec le livre de Jules Verne 16 juillet, l'ESA annonce que l'ATV sera détache d'ISS entre le 5 et le 22 septembre et détruit dans l'atmosphère le 29. 23 juillet, l'ATV rehausse l'orbite d'ISS de 7,2 km pour permettre l'amarrage du Progress M65 et du Soyouz TMA 13 en septembre et octobre prochain. 13, l'ATV fait une dernière relève d'orbite d'ISS (environ 5,8 km) à 7h 58 TU. Les moteurs de l'ATV se sont allumés durant 16 minutes pour porter l'altitude de la station à 355,9 km. 27 août, les moteurs de l'ATV réalise une manoeuvre d'évitement DAM (Debris Avoidance Maneuver) pour éviter une collision avec un objet orbital, un morceau de Cosmos 2421 à 1627 km de distance. la manoeuvre a duré 5 minutes 2 secondes. La dernière manoeuvre DAM avait eu lieu le 30 mai 2003. 5 septembre, l'ATV 1 "Jules Verne" se sépare d'ISS. Rempli de 900 kg de déchets solide et 254 kg de déchets liquide, le vaisseau automatisé se détache du module russe vers 21h 28 TU, contrôlé par le Tsoup de Moscou. Le système de contrôle d'attitude de la station est coupé pour éviter des efforts dynamiques. Eloigné à la vitesse de 7m-s de la station par des ressorts, le véhicule est remis à la bonne attitude puis utilisant ses moteurs s'éloigne d'ISS.
L'ATV volera tout seul pendant 23 jours. L'²ATV sera sur la même trajectoire que l'ISS, mais à l'arrière de celle-ci et à une altitude inférieure. Cette durée est nécessaire pour effectuer ces manoeuvres en optimisant la consommation d'ergols, afin que l'ATV arrive avec précision au point de rentrée dans l'atmosphère, au-dessus d'une région totalement inhabitée du Pacifique sud, de façon à être visible de l'ISS et de deux avions d'observation spécialement équipés qui seront sur zone pour surveiller la région. Le 29 septembre, deux manoeuvre de désorbitation seront commandées par le centre de Toulouse (à 12h 14 et 15h 12) pour le faire rentrer dans l'atmosphère. La mission du prototype "Jules Verne" aura durer 7 mois dont 5 accroché à ISS. L'ATV a ainsi réalisé de nombreuses manoeuvres, 5 reboosts, 7 contrôles d'attitude et une d'évitement de satellite fin août. Le second ATV est en intégration chez EADS Astrium pour un lancement mi 2010. Le cerveau est à Brême, il sera testé cette année ainsi que le module de propulsion. Thales Alenia doit livrer le cargo pressurisé mi 2009. Les accords prévoyait 9 ATV, réduit à 5 avec la fabrication de 4 ATV en plus du Jules Verne. Les modèles 3 et 4 sont encore soumis à autorisation de la part des conseils des ministres européens de novembre prochain. Deux autres exemplaires pourraient être fabriqués si la vie de la station est prolongée, après 2016. 29 septembre, l'ATV entame sa rentrée
dans l'atmosphère. Deux allumages sont prévus, le
premier dé-circularise l'orbite, le second 3 heures après déclenche
la rentrée pour que cela finisse dans la zone poubelle de l'océan indien
une heure après.
Image de la rentrée de l'ATV prises par l'avion DC 8 d'observation
|
| CARACTERISTIQUES DE L'ATV |
| LA MISSION ATV 2 |






.jpg)

.jpg)