LA MECANIQUE SPATIALE SIMPLIFIEE (4)
|
LE RENDEZ VOUS ORBITAL Il n'est pas possible d'aborder ici tous les détails d'une telle mission, mais simplement d'aborder les questions essentielles. Les problèmes posées sont nombreux: Si (P) désigne le plan orbital de la cible,
il est impératif que le chasseur évolue dans ce plan pour rejoindre la cible.
En effet, les manœuvres consistant à changer de plan coûtent toujours très
cher. Exemple: un changement de plan de 1° pour une orbite circulaire à 200
km, coûte 136 m/s. La solution est que le décollage de la base de lancement
doit avoir lieu exactement à l'INSTANT DU PASSAGE DE LA BASE DANS LE PLAN
ORBITAL (P). En pratique, c'est un peu plus complexe car le tir, pour des
raisons de sécurité ou autres n'est pas strictement plan. Le but à atteindre
est qu'à l'injection les plans orbitaux cible et chasseur soient confondus. On pourrait penser que l'heure du tir se conserve tous les jours, c'est oublier que la perturbation due à l'aplatissement polaire fait dériver l'orbite cible autour de l'axe nord-sud. Il s'ensuit donc un décalage journalier de l'heure de tir possible de l'ordre de 30 à 33 mn/jour pour une cible en orbite circulaire entre 300 et 500 km, d'inclinaison voisine de 30°. Au moment de l'injection sur l'orbite initiale Co, le chasseur et la cible sont dans des positions bien définies par la date et l'heure de tir. L'angle au centre de la terre, entre le chasseur et la cible, mesuré dans le sens du mouvement, s'appelle LE PHASAGE INITIAL delta F.
Comme d'un jour sur l'autre la cible n'effectue pas sauf hasard particulier, un nombre entiers de révolutions, cet angle delta F peut donc varier de manière considérable, d'un jour à l'autre. Par exemple, la variation de delta F peut atteindre 180° pour une orbite de type navette gravitant vers 330 km du sol. Cette variation du phasage en fonction du jour du tir, impose de mettre en place une stratégie de rendez-vous acceptant tous les phasages. Le rendez-vous étant une opération importante et complexe, les équipages chasseur ou cible doivent s'y préparer notamment sur le plan physique et en concentration. Donc bien avant le rendez-vous, les horaires de travail sont prédéfinis en fonction du rendez-vous, surtout qu'en orbite basse la notion de jour et de nuit perd son sens. Classiquement, la montre des équipage est réglée sur 16 h, au moment de l'injection du chasseur sur l'orbite Co. A partir de là, la journée de travail devient classique, organisée en cycle de 24 h, comme à terre, avec un repos obligatoire de 20 h le soir jusqu'à 8 h du matin. Les manœuvres ne peuvent intervenir que durant les créneaux autorisés de travail. Le respect des horaires et une durée raisonnable de la mission, conduisent à envisager un rendez-vous exceptionnellement en 24 h et plus classiquement en 48 h, jamais plus. Le rendez-vous concerne en général une station spatiale, à bord de laquelle des expériences scientifiques sont réalisées. Une ORBITE CIRCULAIRE est donc la norme. L'altitude de la station va dimensionner les
réserves d'ergols. Une altitude élevée demandera beaucoup de carburant et une
orbite basse posera plutôt un problème pour les phasages élevés qui
pourraient utiliser des orbites de dérives basses, entraînant des pertes
conséquentes de vitesse par frottement atmosphérique. Il faut alors prendre en
compte un surcoût en carburant. Généralement, le chasseur est injectée sur une orbite basse, circulaire ou elliptique, à périgée bas. Les performances du lanceur assurent alors une masse maximale sur l'orbite initiale Co. Un inconvénient de périgée bas est l'usure de l'orbite par le frottement atmosphérique, surtout sensible au périgée. Nous noterons Zpo et Zao les altitudes du périgée et de l'apogée de Co. Généralement Zpo > 150 km. De nombreuses stratégies sont possibles, chacune demandant une optimisation de la mission globale. Nous n'allons pas en dresser un bilan exhaustif, nous contentant d'un exemple. Le problème essentiel réside dans le phasage delta F qu'il faut annuler en 48 heures. Pour ce faire, on laisse dériver le satellite sur des orbites intermédiaires, jusqu'à arriver à un déphasage nul au moment de l'approche finale. Par l'intermédiaire d'une orbite de Hohman, le chasseur passe d'une orbite d'attente à l'orbite de la cible. La trajectoire relative du chasseur prend alors la forme d'une série de boucles tangentes à l'orbite cible et à l'orbite d'attente. Ce mouvement provient du fait que le chasseur au périgée de son orbite à une vitesse plus grande que la cible et à l'apogée une vitesse plus faible. A l'aide d'une seconde orbite de transfert, le chasseur se rapprochera de la cible. La cible et le chasseur sont alors sur la même orbite, à la même vitesse mais avec un écart minime en distance.
L'APPROCHE : A la fin du phasage, le chasseur se trouve sur une orbite (C**) circulaire de dérive, très voisine à quelques km près, de l'orbite circulaire de la cible Il s'agit alors de rejoindre la cible "en douceur".
En pratique le chasseur se présente par " EN DESSOUS" et EN ARRIERE" de la cible. Il effectue alors des mesures de position et de vitesse relative, avant de décider de la stratégie à adopter. Les stratégies sont nombreuses et il n'est pas question de traiter tous les cas et nous nous limitons au plus simple. On distingue en général 3 étapes essentielles : L'APPROCHE INITIALE L'APPROCHE FINALE LA TRANSLATION FINALE Le but de l'approche initiale (homing) est de
passer de l'orbite de dérive circulaire C** de fin de phasage, sur une orbite
d'attente stable, c'est à dire soit : CAS 1 PAR TRANSFERT EN 2 POUSSEES : On suppose Yo = 0 . Typiquement la manœuvre est transfert de type Hohmann avec une poussée au périgée et une poussée à l'apogée.
Notre manœuvre consistait à rejoindre un point fixe derrière la cible, sur la même orbite que celle-ci. Il est clair que la durée est celle du transfert d'Hohmann soit une demi période de la cible, et donc w(t-to)=p, avec Z(t)=0. NB : Tout se passe comme si le chasseur "remontait" vers le point d'attente avec une pente a = 23°. Donc pour "stopper" le chasseur derrière la cible, il faut encore donner une impulsion positive DV1=DV2. Le coût global de l'opération est donc DV = 2 DV1 = wZo/2. Pour une cible à 380 km du sol et Zo = 10 km, DV = 5.68 m/s Tout se passe comme si le chasseur "remontait" vers le point d'attente avec une pente a = 23°.
CAS 2 PAR TRANSFERT EN UNE POUSSEE : On peut atteindre une ellipse stable derrière la cible avec un point chasseur moyen fixe en repère local.
TRANSFERT EN POUSSEE CONTINUE : On peut arriver au même résultat, en terme de forme de trajectoires par une poussée continue sur une demi période. Par exemple pour le cas 1 le coût en DV est le même
APPROCHE FINALE (CLOSING) : Le chasseur vient se positionner derrière la cible à une centaine de mètres de celle-ci. Tous les types de propulsion sont possibles.
Parvenu au point d'attente fixe, le chasseur effectue un retournement de 180°, pour présenter le mécanisme d'amarrage face à celui de la cible. Les ultimes mesures de position et de vitesse dont réalisées.
TRANSLATION FINALE ( DOCKING ): Il ne reste plus quelques dizaines de mètres à parcourir. Le chasseur se déplace suivant l'axe X, pour rester axer sur le centre du cône d'amarrage, dans lequel il viendra exercer une petite percussion en final.
RENDEZ VOUS ATV ISS
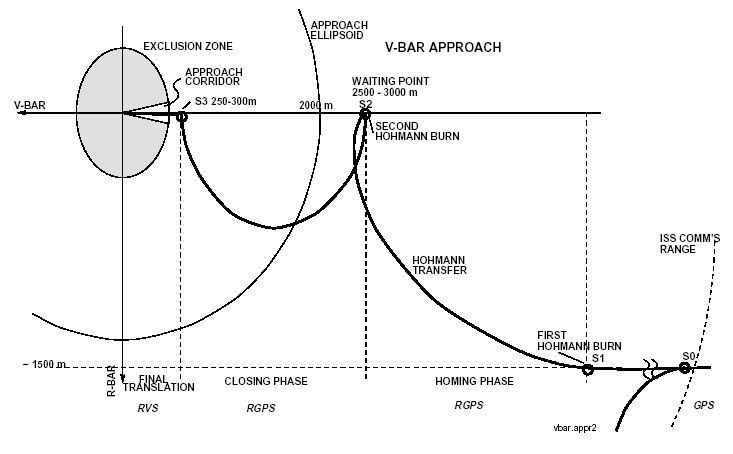
Après l'arrivée au point d'insertion S0 à approximativement 2 km en dessous et 30 km derrière l'ISS, débutent le scénario de rendez vous et d'amarrage avec une trajectoire de dérive. Le point S0 est le point final d'allumage de la dernière orbite de transfert de Hohmann depuis l'orbite de phasage. En ce moment l'ATV est en communication avec la station et peut acquérir la navigation relative grâce au GPS. La trajectoire de dérive dure environ les 3/4 d'une orbite et est employée pour des corrections d'orbite et pour la préparation du transfert final S1 - S2 vers l'orbite de la station cible. Au point S2, situé à 2500m derrière l'ISS, le véhicule d'approche doit attendre la permission d'entrer dans l'ellipsoïde d'approche (AE), qui est une zone de trafic autour de l'ISS avec un diamètre de 2000 m sur 1000. De ce point S2 d'attente, une manoeuvre d'excentricité amènera le véhicule au point S3, un second point de visée de la station à 250 m derrière. La translation finale est la dernière sous phase pendant lequel l'ATV approche l'ISS nominalement sur une ligne droite. Cette ligne doit être dans un cône convergent représentant le couloir permis pour l'amarrage, dont la ligne centrale aboutit au centre du port d'amarrage choisit sur ISS. Après chacune de ces manoeuvres, des phases
d'attente sont observées sur demande du contrôle sol pour vérifier les
procédures et éventuellement recalculer les trajectoires. Pendant la dernière
partie de la translation finale, comme pendant les phases précédentes, la
trajectoire du chasseur n'est pas sécurisée passivement, c'est à dire n'a pas
pour conséquence une trajectoire libre quand les moteur ont été allumés.
|
| MECANIQUE SPATIALE, partie 5 |
Remerciement à Robert Guiziou pour l'utilisation de son texte