 |
LA MISSION STS 123
|
En un peu plus d'un mois, 34 jours exactement, la NASA a réussit à lancer deux missions Shuttle avec succès. Après Atlantis, l'assemblage de la station ISS continue avec Endeavour STS 123. Le lancement de nuit a lieu le 11 mars 2008 à 6h 28 TU depuis le LC 39A. La mission de ce 121eme vol est la mise en place du premier module japonais Kibo "espoir" le Pressurized Logistic Module et l'extension du bras SSRMS, le Dextre. L'équipage d'Endeavour est commandé par Dominic Gorie et Gregory H. Johnson. L'accompagnent les MS Rick Linnehan, Robert L. Behnken, Garrett Reisman, Mike Foreman et Takao Doi de la JAXA. L'astronaute japonais retournera sur terre avec Endeavour. Akihino Hoshide volera sur STS 124 avec Discovery en tant que MS tandis que Koichi Wakata volera sur STS 119 comme ingénieur de vol et retournera sur terre avec STS 127. L'astronaute européen Leopold Eyharts retournera à bord d'Endeavour.
L'ascension d'Endeavour est suivit comme à l'accoutumé par les nombreuses caméras entourant le centre spatial. Aucun débris n'est vu se détachant du réservoir externe. A T+10 s, quelque chose est observé tombant sur le nez de l'Orbiter, probablement un oiseau comme se fut le cas sur STS 114. De toute façon, la vitesse à ce moment là n'était pas assez élevée pour causer quelques dommages. Un autre débris est vue à T+83 secondes frôlant l'aile droite. Après 8 mn et demi de vol propulsé, les moteurs sont arrêtés et le réservoir largué. En suivant les recommandations de la commission d"enquête sur l'accident de Columbia, Endeavour embarque un système de photographie au flash lors de la séparation du réservoir externe. Deux flashs Nikon ont été ajouté dans l'équipement de bord pour prendre les 23 photos du réservoir. A 8h 23, les portes de la soute sont ouvertes.
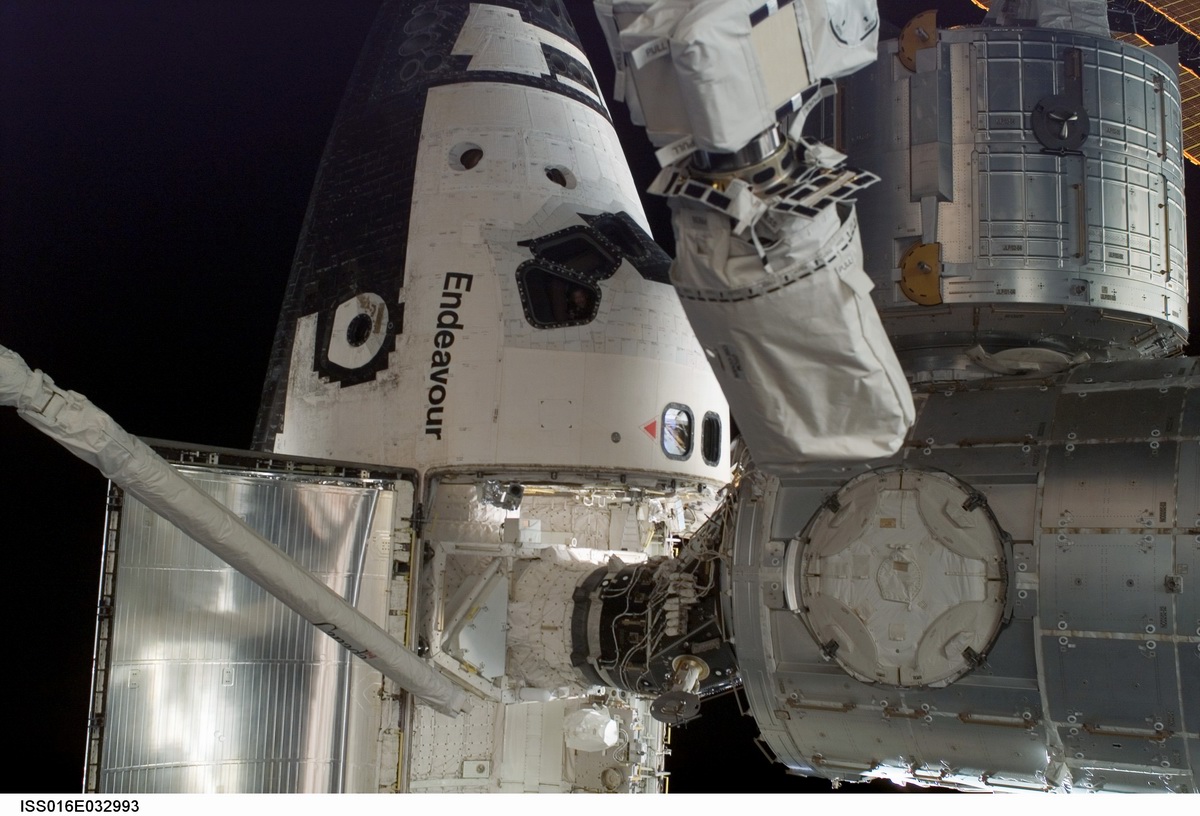
12 mars, FD 2, l'équipage est réveillé à 16h 29, heure de Houston. Au programme de la journée, l'inspection de protection thermique d'Endeavour avec le bras OBSS. Les astronautes vérifient leur scaphandres et se préparent au rendez vous avec ISS. 13 mars, Endeavour s'amarre à ISS à 3h49 TU. Juste avant la traditionnelle manœuvre de "pitch" permet aux astronautes dans la station de prendre la carlingue de l'Orbiter en photos à travers les hublots 4 et 6 du module de service Zvezda avec des objectifs de 400 et 800 mm de focale. Garrett Reisman rejoint officiellement l'équipage d'ISS 15 en remplacement de Leopold Eyharts, lancé en février dernier avec Atlantis. Son siége Soyouz est déplacé dans le TMA 11.
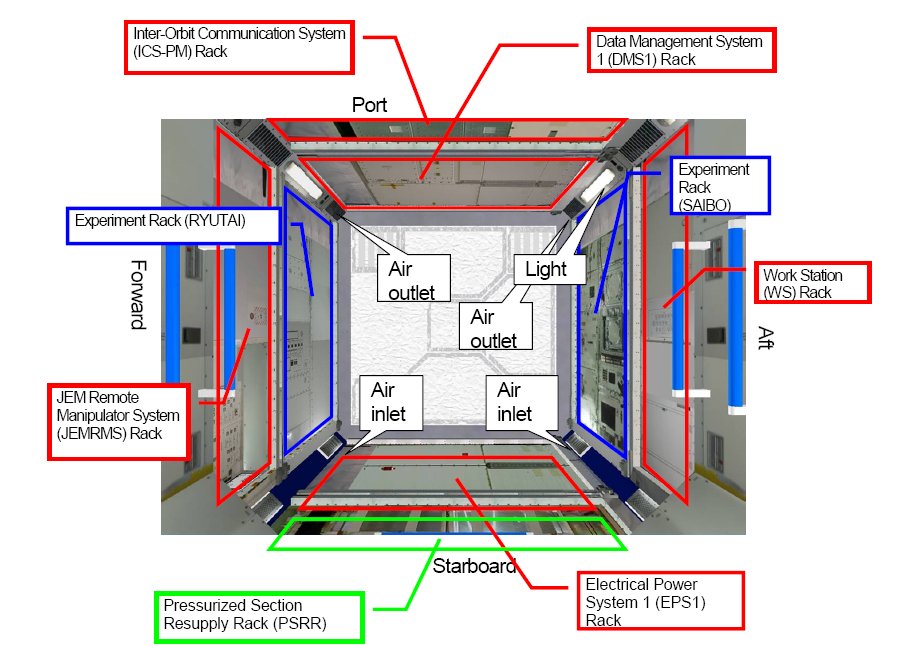
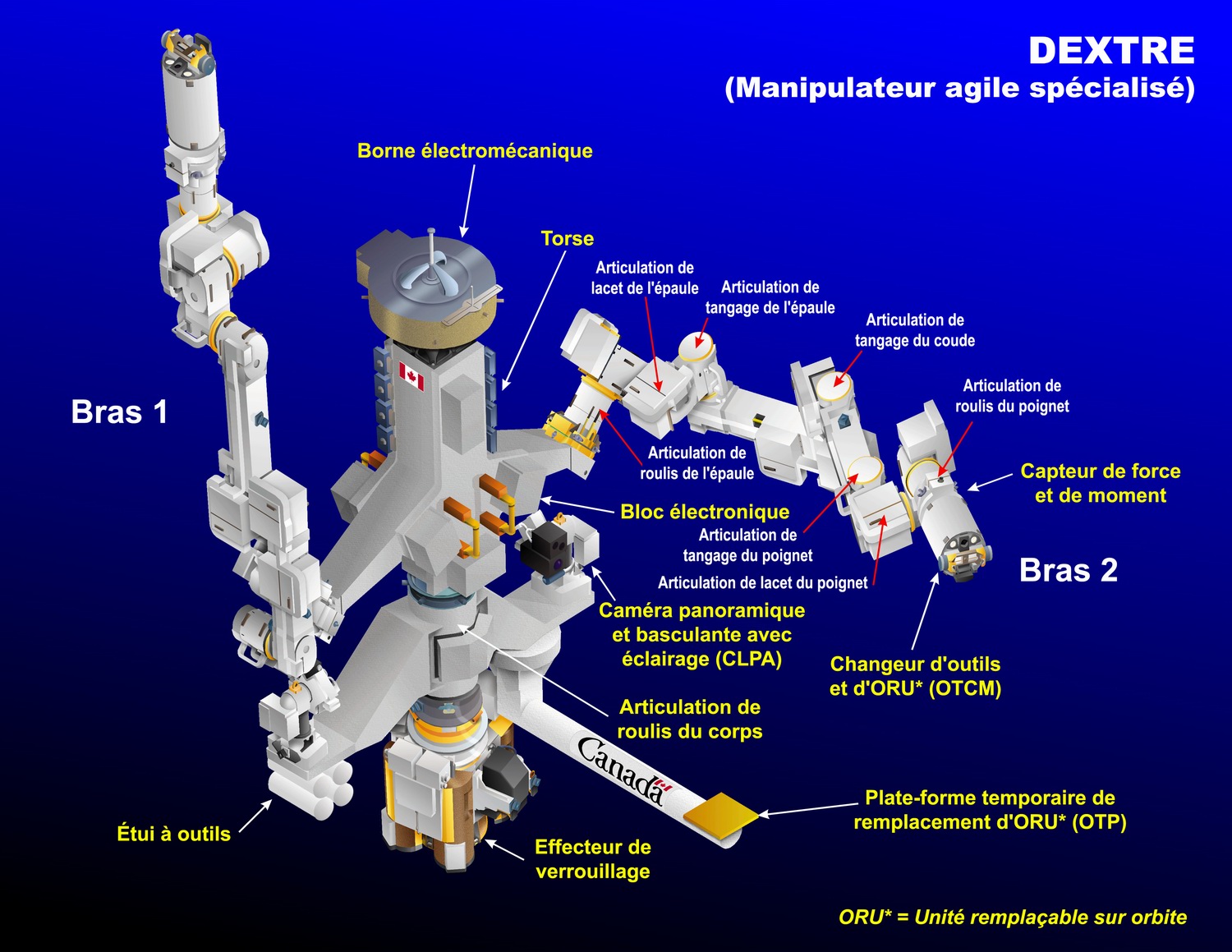
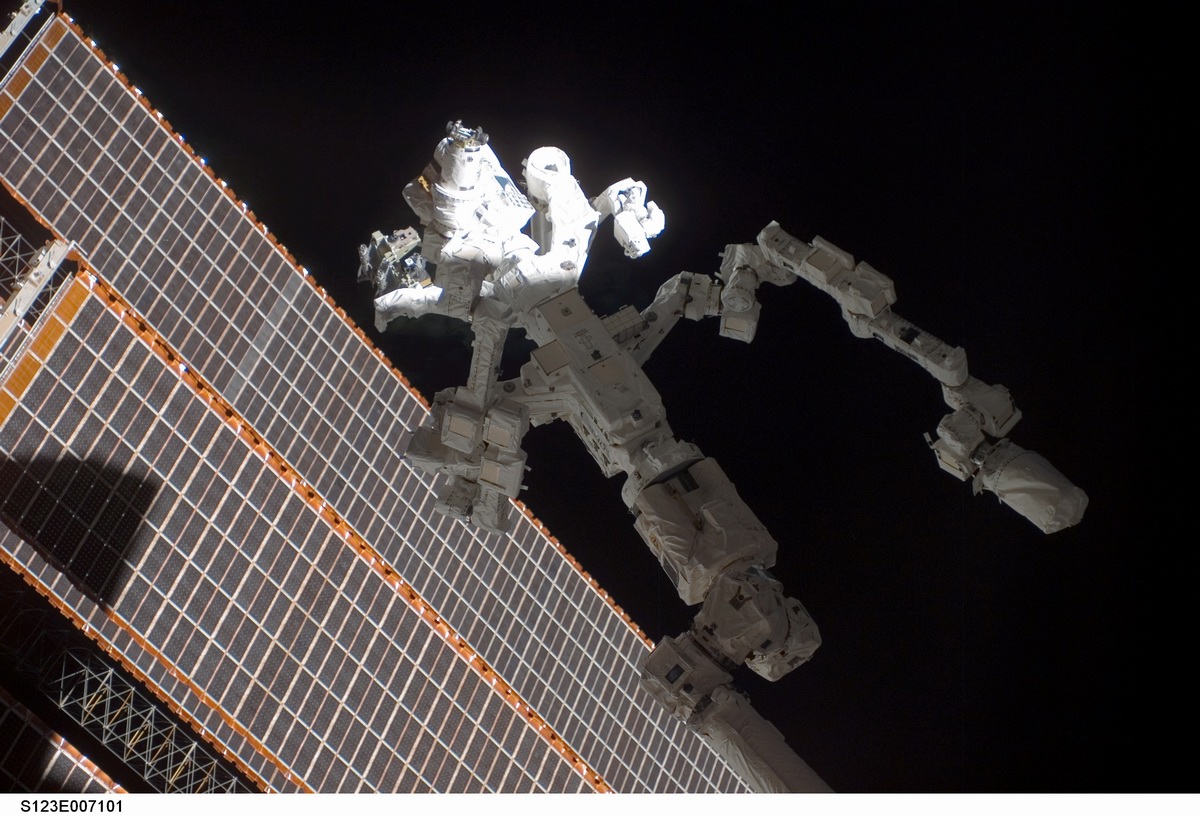
La mission STS 123 va permettre la mise en place du premier module japonais JEM Japanese Experiment Module sur ISS, la section pressurisée ELM-PS. Ce module servira pour le stockage des instruments, expériences et matériels de rechange. Il communiquera librement avec le module pressurisé Kibo qui sera amené lors du vol 124. Au cours de 2 EVA, les astronautes devront assembler et mettre en service le SPDM, le manipulateur Dextre, fabriqué par les canadiens. Lors de la 4eme EVA, les astronautes devront aussi tester une technique de réparation des tuiles thermiques en orbite en utilisant le Tile Repair Ablator Dispenser (T‐RAD) Detailed Test Objective (DTO) 848. Enfin pour le dernière sortie, le bras OBSS sera laissé sur la station. 14 mars, FD4, c'est la première des 5 EVA Reisman et Linehan sont dans la soute vers 21 heures, heure de Houston pour préparer le module JEM et commencer l'assemblage du Dextre. Le SPDM est installé dans une palette Spacelab" dans la soute (palette qui a déjà emporter le PMA, le bras SSRMS, des réservoirs pour Quest et qui embarquera Cupola). A cause de sa taille, il n'a pu être monté au sol et ne peut l'être dans la soute. Quelques heures après l'amarrage, il a été déplacé sur la poutre P1 de la station où il sera assembler par les astronautes. Un petit soucis d'alimentation électrique des couvertures chauffant les joints d'articulation du bras est constaté sur la palette mais qui ne devrait pas posé de problème pour le montage. Dextre peut tenir 5 jours au froid, à la seule condition que l'on ne retire pas ses couvertures thermiques. Un problème similaire est intervenu avec le Canadarm 2 et le chariot mobile lors de leur installation respective, le signal confirmant le passage du courant électrique n'était pas reconnu assez vite par le système informatique. Un patch informatique avait permit de rallonger le délai de détection. Le même type de patch a été envoyé vers le Dextre mais sans succès. Au sol, les techniciens s'orientent vers un problème d'interface au niveau d'un câble de données entre la station et la palette. Un nouvel essai devrait voir Dextre se connecter au bout du bras SSRMS. Après assemblage Dextre sera positionné sur Destiny et la palette ramené au sol.
Les astronautes commencent par enlever les couvertures thermique recouvrant le mécanisme d'amarrage du JEM et débrancher le câble le reliant à la soute. L'astronaute japonais Takao Doi au commande du bras RMS soulève lentement le module et le positionne sur le Node 2. De leur coté, Reisman et Linehan commence l'assemblage des 11 éléments du Dextre. Calé au bord de la palette et sur le bras de la station, ils commencent par brancher les deux ORU Tool Change-out Mechanism" (OTCM), système changeur d'outil au bout des deux bras de Dextre (long chacun de 3,4 m). Au cours de la seconde EVA, les bras seront reliés au torse. Les deux hommes rentrent après 6h 30 passés dans l'espace.
Dans la soirée, le problème sur Dextre est résolu: un défaut de câblages sur la palette Spacelab. En l'alimentant directement avec le bras de la station, il fonctionne.
15 mars, FD 6, Linnehan et Foremanau se consacre au montage de Dextre lors d'une EVA de 7h 08. Fixé à l'extrémité du Canadarm2, Linnehan libère les boulons à la base du torse principal de Dextre qui repose sur le plancher de la palette. Le corps principal est relevé de 60° pour permettre le raccordement des bras et des épaules. Les 2 caméras seront ajoutés lors de la 3eme EVA de chaque coté de la taille du robot. 6 mois seront nécessaire pour tester le bras afin d'être pleinement opérationnel. La durée de vie du bras est de 15 ans.
Le 17 mars, FD 8, une 3eme
EVA de 6h 54 termine non sans mal l'assemblage du bras Dextre avec l'installation de la plateforme à outils
ORU et des caméras CLPA (Camera, Light, PTU Assemblies).
20 mars, FD11, la 4eme et avant dernière EVA permet à Behnken et Foreman de remplacer les Remote Power Controller Module RPCM défaillants sur les poutres Truss et de tester la réparation de tuiles thermique dans la soute sur des échantillons Detailed Test Objective (DTO) 848. Le RCPM sert à protéger les circuits électriques des gyroscopes GMC assurant la redondance. L'expérience DTO 848 est réalisé sur le module Destiny. 10 échantillons sont "réparés" durant la sortie. Ils seront ramenés sur terre pour analyses. Le reste de la sortie est consacré à divers travaux sur Harmony pour préparer l'arrivée de Kibo en mai et à enlever les couvertures thermiques sur un bras de Dextre. A 4h 30 TU, les astronautes rentrent dans le sas après une sortie de 6h 24.
Lorsque le module Kibo a été conçue par le Japon pour ISS, il n'était pas prévu qu'il voyage avec un passager supplémentaire dans la soute de l'Orbiter. Après l'accident de Columbia, la NASA décide de développer le bras optique OBSS pour inspecter le système de protection thermique de ses Orbiter une fois en orbite. Ce bras qui ressemble au bras RMS est embarqué dans la soute lors de chaque mission depuis STS 114. Lorsque Kibo sera installé dans la soute pour le vol 124, il n'y aura pas de place pour ajouter le bras OBSS. La NASA a donc prévu de laisser le bras OBSS d'Endeavour sur la station, l'inspection de la TPS se faisant avant le undocking, procédure testé lors des vols 121 et 117. Discovery le récupérera après s'être amarrer à la station. Les astronaute
d'Endeavour commencent l'inspection de la TPS vers 19h TU, commençant
par l'aile droite et le nez. L'inspection de
la voilure de droite fera l'objet d'une procédure nouvelle pour éviter
que le bras ne se rapproche trop des panneaux de carbone du bord
d'attaque. L'imagerie complète prendra environ 34 heures plus 8 pour la
détection d'impact d'objets et micro météorites. Le transfert du bras
se fera 24 heures après le début de l'inspection (95% de régions
"chaude" seront couvertes). En cas de besoin, une EVA permettra
de le remettre dans la soute pour une inspection plus fine. Elle se
termine à 1h 26 du matin par l'aile gauche.
C'est Behnken et Foreman qui réalise la
5eme et dernière EVA de la mission le 22 mars. Endeavour doit laisser son bras
OBSS sur la station. Discovery le récupérera lors de la mission STS 124.
Pour la mission STS 124, il ne sera pas possible de réaliser une inspection complète de la protection thermique de Discovery avant l'amarrage avec ISS. L'équipage utilisera les caméras du bras RMS pour réaliser une inspection globale de l'Orbiter. Du fait de la place prise par Kibo dans la soute, la caméra de coude du bras sera mise hors tension jusqu'au transfert du module vers ISS. De plus, le bras OBSS ne pourra opérer que lors des périodes de jour contrairement au bras OBSS qui opère de jour comme de nuit. Lors de la manoeuvre de RPM Rbar Pitch Maneuver au FD 3, l'équipage de la station aura la possibilité de photographier le ventre de Discovery avant le docking. Le bras OBSS sera détaché de la poutre S1 lors d'une EVA au FD 4. Le bras de la station l'agrippera et le donnera au bras du Shuttle. Le bras OBSS sera contrôlé lors du FD 5 pour une première inspection au FD 7 et l'inspection "finale" au FD 11 après le "undocking" de la station.
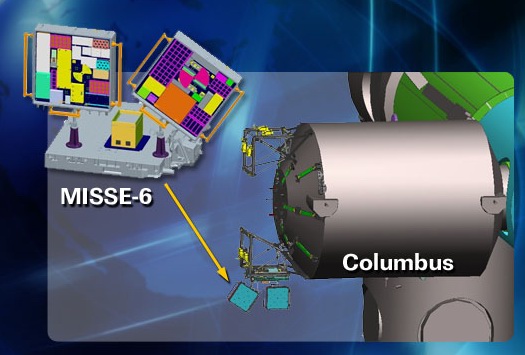
Behnken récupère dans la soute les deux paquets MISSE 6 et les fixe à nouveau sur une des deux palettes externes du module Columbus. Armé d'un marteau, il insère de force les goupilles fixant la palette. Les échantillons resteront exposés au vide durant 18 mois.
Foreman de son coté rend visite au panneau S6 pour prendre des photos en haute résolution du joint SARJ. La sortie a duré 6h 02 mn. L'ensemble des EVA de la mission totalise 33h 29 mn.
23 mars, c'est la séparation avec ISS. A 21h 13 a lieu la cérémonie d'adieu avec l'équipage d'ISS 16 puis la fermeture de l'écoutille du PMA 2. Garrett Reisman remplace Leopold Eyharts dans la station au coté de Whitson et Malentchenkov. La séparation avec ISS est légèrement retardé à cause de la mauvaise orientation d'un panneau solaire de P6. A 00h 25 le 24 mars, les deux vaisseau se détachent. passant au dessus de la station, l'équipage peut admirer la nouvelle configuration de la station avec le module japonais. Le retour est prévu le 25 au KSC à 23h 05 TU. 25 mars, l'équipage est réveillé
à 14h TU pour leur 17eme journée de vol. A 19h 26, les portes de la
soute sont refermées, la météo est bonne sur la Floride pour un
atterrissage à 23h 00 TU. Des nuages ont été observés au Sud mais,
le ciel est dégagé au Nord, à l'endroit où Endeavour fera son
approche finale. Endeavour arrivera par le Sud, après avoir survoler le
Pacifique, l'Amérique centrale, la Jamaïque et Cuba. L'Orbiter passera
au dessus de Maimi et Cap Canaveral juste au dessus du SLC 17. Survolant
le pad 39, Endeavour tournera à 195° pour s'aligner sur la piste 15.
|
|||||||||||||||||||||||||
PHOTOS DE LA MISSION JSC HOUSTON |




















{kind=link}